| | Kategorien
Comic-Art ...
Special Pin-Ups, ...
Surreale Sichten, ...
Reale Sichten, ...
Cartoons, ...
Karikaturen, ...
Unsortiert, Zeichnungen, ...
Textblumen, ...
Der Kirchenplanet.
Spezielle Streifzüge.
Quick and dirty.
Märchenhaftes
Dark worlds.
Bürgerlich Anständiges.
Kunst vom Nachwuchs.
Texte ...
Artikel ...
Kosmisches ...
Hintergrundrauschen ...
Achtung, Wääärbung ...
Sonstiges ...
Übersicht
Aktueller Beitrag

Add-ons
Selbstbauteleskope
Raumfahrtkatalog
Veröffentlichtes


|
|
Motivation
Vorheriger Artikel
Übersicht
Startseite
Galerie
Nächster Artikel
Impressum
23.09.2018 von eb
, - Aktuelle Bilder
Ein Früchtegarten fürs All
Oder auch: das Konzept für die Steuerung und die Basis davon.
Klick macht alle Bilder größer
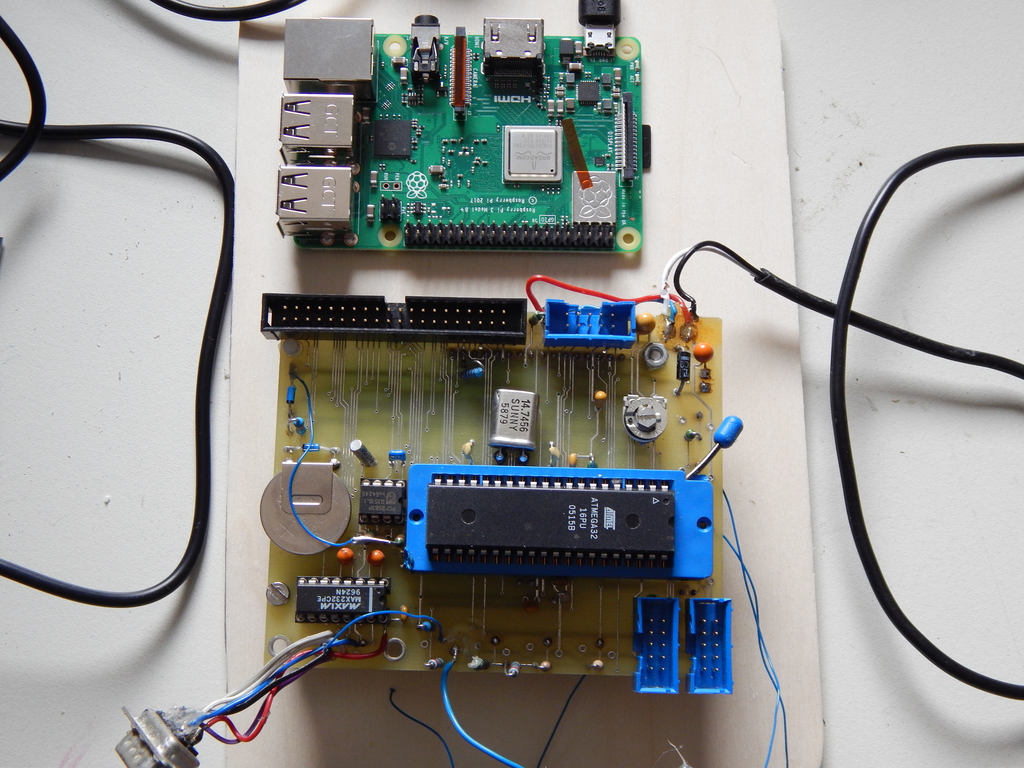
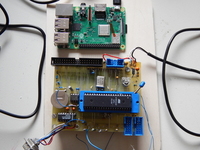 Im Zuge der Ermittlung zur sinnvollst eigenen, aber auch dem Geiste Dobsons entsprechend, der erschwinglichsten Eigenlösung für's eigene motorisierte Teleskop, hat unsereiner erst mal seine Bastelbestände in den Tiefen Speicher-orientierter Endlagerung durchwühlt. Was doch schon das meiste auf ein erfreuliches Minimum an möglichen Aufwendungen reduzierte. Danach, war man auf der Suche zur Lösung eines Problems, welches das Vorhandene leider nicht mehr erfüllen konnte. Wobei ich aber auch gleich auf die Schönheiten von Himbeeren aufmerksam wurde und mir dabei einen seltsamen Früchtetick einfing. Jedenfalls, - nach deftiger Erhöhung des Spaßfaktors dabei, sowie weiteren recht umfangreichen Kalkulationen und Überlegungen, war das Konzept klar, - und sieht, ganz simpel, - folgendermaßen aus; Eine in den Außenmaßen zwar sehr kleine, aber rechen-technisch sehr mächtige eingekaufte Himbeere, (auf dem Bild oben), wird mit einer bereits schon länger existierenden Brombeere von mir selbst gekoppelt, (auf dem Bild unten), - welche wiederum, zwei bis drei noch zu züchtende Johannisbeeren ansteuert, die wiederum jede für sich eine eingekaufte Holunderbeere in der eigenen Gartenparzelle gießt. Möglicherweise, muss ich aber jetzt erst einmal die Früchte und den Landschaftsbau näher erklären.
Im Zuge der Ermittlung zur sinnvollst eigenen, aber auch dem Geiste Dobsons entsprechend, der erschwinglichsten Eigenlösung für's eigene motorisierte Teleskop, hat unsereiner erst mal seine Bastelbestände in den Tiefen Speicher-orientierter Endlagerung durchwühlt. Was doch schon das meiste auf ein erfreuliches Minimum an möglichen Aufwendungen reduzierte. Danach, war man auf der Suche zur Lösung eines Problems, welches das Vorhandene leider nicht mehr erfüllen konnte. Wobei ich aber auch gleich auf die Schönheiten von Himbeeren aufmerksam wurde und mir dabei einen seltsamen Früchtetick einfing. Jedenfalls, - nach deftiger Erhöhung des Spaßfaktors dabei, sowie weiteren recht umfangreichen Kalkulationen und Überlegungen, war das Konzept klar, - und sieht, ganz simpel, - folgendermaßen aus; Eine in den Außenmaßen zwar sehr kleine, aber rechen-technisch sehr mächtige eingekaufte Himbeere, (auf dem Bild oben), wird mit einer bereits schon länger existierenden Brombeere von mir selbst gekoppelt, (auf dem Bild unten), - welche wiederum, zwei bis drei noch zu züchtende Johannisbeeren ansteuert, die wiederum jede für sich eine eingekaufte Holunderbeere in der eigenen Gartenparzelle gießt. Möglicherweise, muss ich aber jetzt erst einmal die Früchte und den Landschaftsbau näher erklären.
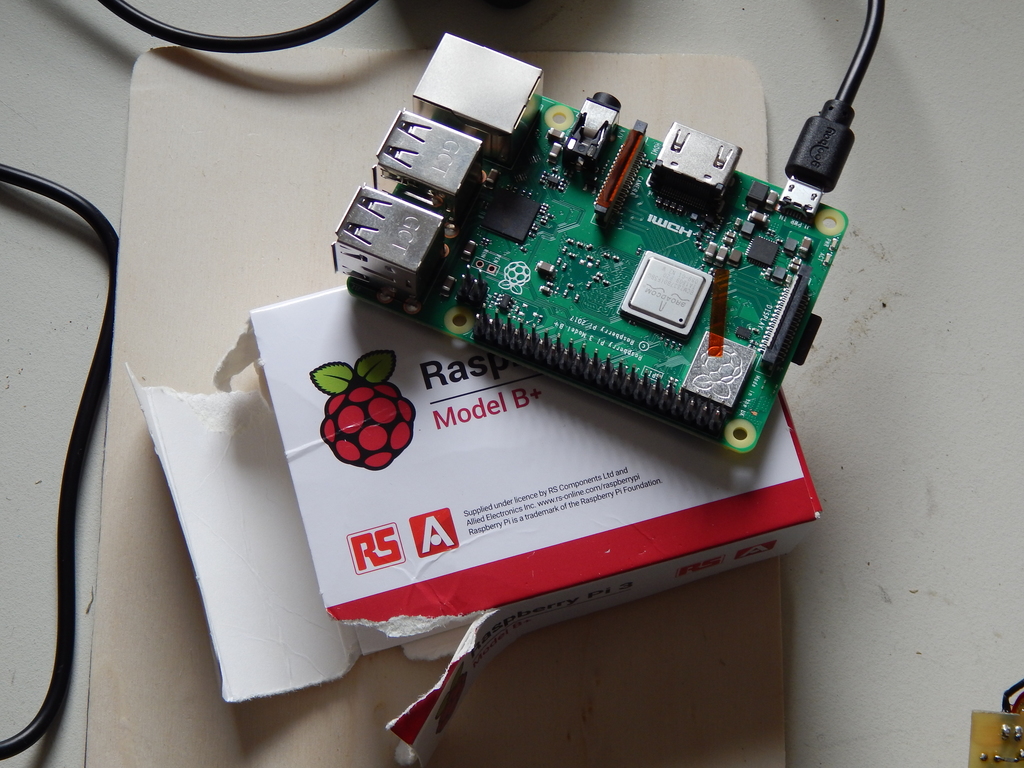
Die kleine große Himbeere, der Raspberry PI3 Bplus
 Dieses Teil, erfreut sich mittlerweile großer Beliebtheit und ist im Grunde
ein 50x80 mm großes Board mit einer 64-bit Quad-Core-CPU von Broadcom mit
Arm Cortex A53-Architektur, die mit 1,4 Ghz läuft und einen bemerkenswert geringen Stromverbrauch aufweist. Hat einen
Gigabyte Speicher, 4 Usb-Ports, einen Ethernet-Port, Wlan, Anschlüsse für
Displays, Kameras, HDMI, Sound und eine Steckerleiste für Signalports, - inklusive RS232, SPI und I2C. Das Teil bekommt man für ca. 30 Euro bei allen einschlägigen
Lieferanten fürs Elektronische, welche auch ein Herz für den Privatgärtner haben.
I.d.R. liest man sich erst mal durch die recht guten Erklärungen dafür
auf dem Netz durch, - dann kauft man es, - ärgert sich erst mal über einen dämlichen Mini-Usb-Anschluss für den Saft und besorgt sich deshalb noch ein Netzteil
5V/2.4A für ca. 10 Euro dafür, - dann
besorgt man sich eine Micro-SD-karte (Möglichst mit Adapter für die normale Größe
zum auch Einstecken ins Notebook), - richtet darauf nach den Erklärungen das Image
eines Raspian-linux ein, - am besten noch eine leere Datei ssh.txt mit dazu, -
und wenn man wlan direkt benutzen will, auch noch eine dem eigenen wlan entsprechende
wpa_supplicant.conf ein, - und schon kann man sich per ssh einloggen.
Eine Alternative ist, USB-Tastatur
und Fernseher anschließen, und ebenfalls loslegen. Sinnigerweise, - erst mal was für Leute mit Linux-Affinität, aber wenn auf dem Ding Windows laufen würde, wäre der eigene
erste Gedanke eh der gewesen, wie man es für so ein schönes Teil durch Linux ersetzen könnte, um den Bedarf an einer-, eben auch bis in die Grundfesten der Kernelei, kontrollierbaren Maschinerie haben zu können. Ich selber, verzichte außer auf wlan und einen usb-Anschluss für eben einen USB-Stick,- aber erst mal auf alle zusätzlich ansteckbaren Dinge,- außer den eigenen. Linux ist schließlich auch ein
Multiprozesssystem und ich kann nichts brauchen, was mir meine eigene Rechenpower
und Zeitsynchronisation stören könnte. Zudem benutzen
z.B. auch einige sehr preiswerte LCD-Displays dafür, Signale eben von der Steckerleiste, die ich sinnigerweise auch erst mal für mich haben möchte.
Im Moment, spricht aber nicht mal im Entferntem
was dagegen, dass alles nicht mit einem normalem Programm in momentaner Umgebung
laufen könnte. Im Zweifelsfalle, gibt es aber noch Wege über Kernelmodule bzw.
auch noch das Abstrippen bis zu einem Uboot-Linux hin, - wenig nötig, mit nur einem Hauptprozess und dann ist das sonstig angesteckte eh tot. Ich erwähne das nur für
den Fall, dass jemand so was ähnlich für sein Scope machen will, das Teil aber
gleichzeitig auch als Multimedia-Maschine benutzen will. Es gibt durchaus verschiedene
Wege das zu tun, aber die Gleichzeitigkeit mit einem fürs Erste noch in der normalen User-Umgebung laufendem Programm, welches ein Teleskop bis zur 100stel Bogensekunde ansteuern soll, - sollte besser vermieden werden. 1,4 Ghz sind gut, aber in Zeitscheiben geschnitten, hat auch das einfach seine Probleme für stur benötigte sonstige Takte.
Dieses Teil, erfreut sich mittlerweile großer Beliebtheit und ist im Grunde
ein 50x80 mm großes Board mit einer 64-bit Quad-Core-CPU von Broadcom mit
Arm Cortex A53-Architektur, die mit 1,4 Ghz läuft und einen bemerkenswert geringen Stromverbrauch aufweist. Hat einen
Gigabyte Speicher, 4 Usb-Ports, einen Ethernet-Port, Wlan, Anschlüsse für
Displays, Kameras, HDMI, Sound und eine Steckerleiste für Signalports, - inklusive RS232, SPI und I2C. Das Teil bekommt man für ca. 30 Euro bei allen einschlägigen
Lieferanten fürs Elektronische, welche auch ein Herz für den Privatgärtner haben.
I.d.R. liest man sich erst mal durch die recht guten Erklärungen dafür
auf dem Netz durch, - dann kauft man es, - ärgert sich erst mal über einen dämlichen Mini-Usb-Anschluss für den Saft und besorgt sich deshalb noch ein Netzteil
5V/2.4A für ca. 10 Euro dafür, - dann
besorgt man sich eine Micro-SD-karte (Möglichst mit Adapter für die normale Größe
zum auch Einstecken ins Notebook), - richtet darauf nach den Erklärungen das Image
eines Raspian-linux ein, - am besten noch eine leere Datei ssh.txt mit dazu, -
und wenn man wlan direkt benutzen will, auch noch eine dem eigenen wlan entsprechende
wpa_supplicant.conf ein, - und schon kann man sich per ssh einloggen.
Eine Alternative ist, USB-Tastatur
und Fernseher anschließen, und ebenfalls loslegen. Sinnigerweise, - erst mal was für Leute mit Linux-Affinität, aber wenn auf dem Ding Windows laufen würde, wäre der eigene
erste Gedanke eh der gewesen, wie man es für so ein schönes Teil durch Linux ersetzen könnte, um den Bedarf an einer-, eben auch bis in die Grundfesten der Kernelei, kontrollierbaren Maschinerie haben zu können. Ich selber, verzichte außer auf wlan und einen usb-Anschluss für eben einen USB-Stick,- aber erst mal auf alle zusätzlich ansteckbaren Dinge,- außer den eigenen. Linux ist schließlich auch ein
Multiprozesssystem und ich kann nichts brauchen, was mir meine eigene Rechenpower
und Zeitsynchronisation stören könnte. Zudem benutzen
z.B. auch einige sehr preiswerte LCD-Displays dafür, Signale eben von der Steckerleiste, die ich sinnigerweise auch erst mal für mich haben möchte.
Im Moment, spricht aber nicht mal im Entferntem
was dagegen, dass alles nicht mit einem normalem Programm in momentaner Umgebung
laufen könnte. Im Zweifelsfalle, gibt es aber noch Wege über Kernelmodule bzw.
auch noch das Abstrippen bis zu einem Uboot-Linux hin, - wenig nötig, mit nur einem Hauptprozess und dann ist das sonstig angesteckte eh tot. Ich erwähne das nur für
den Fall, dass jemand so was ähnlich für sein Scope machen will, das Teil aber
gleichzeitig auch als Multimedia-Maschine benutzen will. Es gibt durchaus verschiedene
Wege das zu tun, aber die Gleichzeitigkeit mit einem fürs Erste noch in der normalen User-Umgebung laufendem Programm, welches ein Teleskop bis zur 100stel Bogensekunde ansteuern soll, - sollte besser vermieden werden. 1,4 Ghz sind gut, aber in Zeitscheiben geschnitten, hat auch das einfach seine Probleme für stur benötigte sonstige Takte.
Die Brombeere, ein Board mit dem Atmega32 oder 324
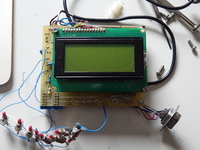 Das Teil ist eigentlich meine alte Steuerung. Für Genauigkeiten um die Bogensekunde herum, auch mit Rechenoperationen doppelter Präzision, ist das brauchbar, - aber bei mehr ist es leider überfordert. Ich habe mir dunnemals sogar eine Leiterplatte dafür machen lassen, wenngleich auch nichts dagegen spricht, es sich nach
Schaltplan zusammen zu fädeln, um solcherlei Kosten
zu vermeiden. Was soll's? Es ist fertig, bereits vorhanden,
also warum soll ich es nicht fürs sture Steuerungstechnische und alles sonstige verwenden, was der Himbeere fehlt, während die die Rechnerei macht?
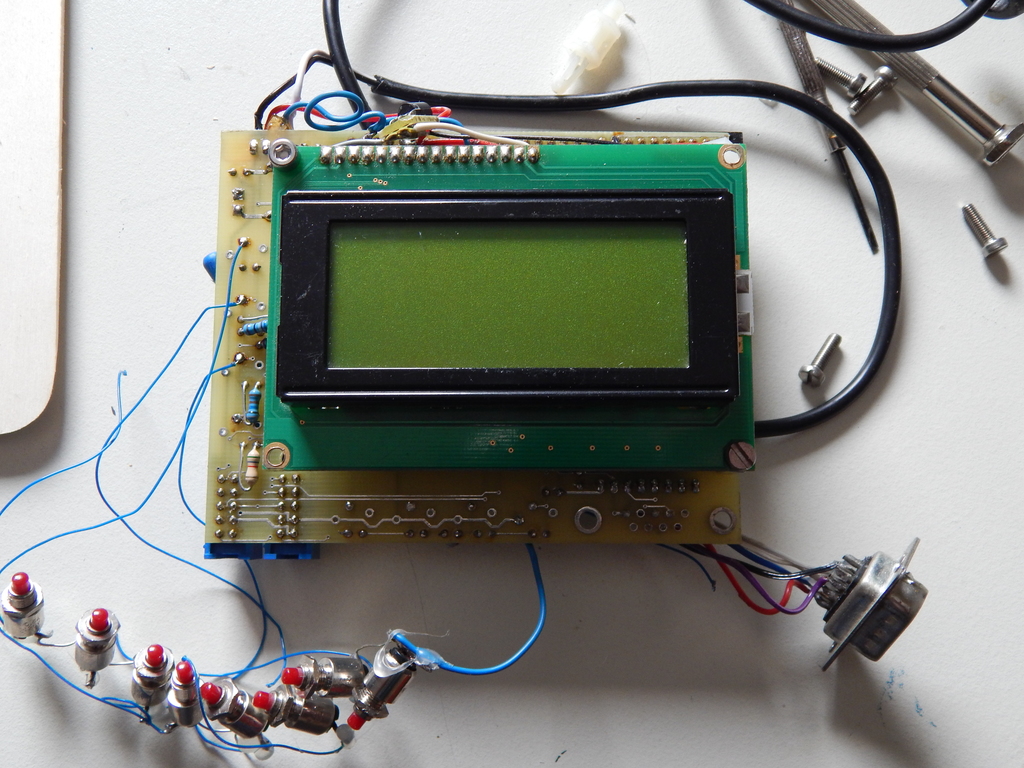
Die Brombeere hat eine mit 14,7456 Mhz
getaktete Atmega32-CPU, eine LCD-Anzeige, eine batteriegepufferte und
auf die hunderdstel Sekunde genaue Echtzeituhr, eine rs232-Schnittstelle
mit kompletter Pegelwandlung, SPI, I2C und jede Menge sonstig
ungenutzer Signale vom Atmega, die bekannterweise neben Benutzung
als I/O oft mehrere programmierbare Funktionalitäten wie z.B. ADC haben und
ich bei dem Ding auf eine Portleiste gelegt habe. Einen ADC benutze ich z.B. über
entsprechende Widerstände für eine Ein-Signal-Tastatur, für aber
acht Tasten über verschiedene Widerstände zur Bedienung. Ich werde
zwei davon verwenden, und die Widerstände extern in eine Handtastatur
mit 12 Ziffern- und Funktions- sowie vier Richtungstasten legen. Das Schöne
an solchen AD-Wandlertastaturen ist, dass man nur sehr wenige Kabel benötigt.
Je nachdem, wie lang die als Verlängerung werden, muss man natürlich deren
eigenen Widerstand mit kalkulieren.
Wird noch eine zweite rs232 Schnittstelle
benötigt, kann der Atmega32 durch einen Atmega324 ausgetauscht werden,
da die beiden Pin-gleich sind, aber letzterer auf den Pins INT0/INT1 auch
noch die Funktionaliät von RXD2/TXD2 hat, für die lediglich noch
die Pegelwandlung fehlt, welche ich auf einem kleinen Miniplatinchen
wahrscheinlich direkt am Stecker anbringen werde.
INT0, kann auf dem Board aber auch stattdessen
für einen Interrupt von der Echtzeituhr verwendet werden, was ich aber
bei neuer Funktionalität nicht gebrauchen kann.
Ansonsten, ist das Teil mittels
extra Anschlüssen für In-System-Programming, Jtag und SPI versehen.
Die Verbindung zum raspberry, sehe ich über einen
schnellen 8-Bit Datenport, und drei Zusatzsignalen vor.
Damit bleiben die sonstigen
Signale für auch SPI, I2C und rs232 des raspberry's erst mal unberührt.
Möglicherweise, gestalte ich mir aber inside für SPI ein kleines Schmankerl, welches
bei normaler Benutzung keine Bedeutung hat. Das Raspian, kennt nämlich die Programme uisp und avrdude zur Interprocess-Programmierung der Atmegas, was, wenn
ich mit einer passendem Flachbandkabelbrücke den raspberry-spi-port
mit dem entsprechendem ICSP-Port meiner Brombeere verbinde, diese
sich eben auch einfach direkt vom raspberry aus aufpumpen lässt.
(Das ich das Brombeerboard auch vorher schon als Aufpumpboard missbraucht
hatte, erkennt man am schönen Schnappverschluss-Sockel der CPU)
Jedenfalls, - für meine Astrozwecke als Motorsteuerung, dient dies Board hauptsächlich als knüppelharte Interruptmaschine, die alles in ein exaktes
Timing von 1/2400stel Sekunde presst,
in derem Frequenzspektrum von 0 ... 2400 Hz
sich auch die Motoren genauso im gesamten Bereich
zwischen Vollgeschwindigkeit und nach-führendem
kleinst möglichem Mikroschritt mit unterschiedlichen
Frequenzen sensibel ansteuern lassen, wie alles dadurch
bereits schon vom Timing her, in eine theoretische Genauigkeit
zum Nachführen, von 2400/15 = 1/160stel Bogensekunde zwingt.
Das Teil ist eigentlich meine alte Steuerung. Für Genauigkeiten um die Bogensekunde herum, auch mit Rechenoperationen doppelter Präzision, ist das brauchbar, - aber bei mehr ist es leider überfordert. Ich habe mir dunnemals sogar eine Leiterplatte dafür machen lassen, wenngleich auch nichts dagegen spricht, es sich nach
Schaltplan zusammen zu fädeln, um solcherlei Kosten
zu vermeiden. Was soll's? Es ist fertig, bereits vorhanden,
also warum soll ich es nicht fürs sture Steuerungstechnische und alles sonstige verwenden, was der Himbeere fehlt, während die die Rechnerei macht?
Die Brombeere hat eine mit 14,7456 Mhz
getaktete Atmega32-CPU, eine LCD-Anzeige, eine batteriegepufferte und
auf die hunderdstel Sekunde genaue Echtzeituhr, eine rs232-Schnittstelle
mit kompletter Pegelwandlung, SPI, I2C und jede Menge sonstig
ungenutzer Signale vom Atmega, die bekannterweise neben Benutzung
als I/O oft mehrere programmierbare Funktionalitäten wie z.B. ADC haben und
ich bei dem Ding auf eine Portleiste gelegt habe. Einen ADC benutze ich z.B. über
entsprechende Widerstände für eine Ein-Signal-Tastatur, für aber
acht Tasten über verschiedene Widerstände zur Bedienung. Ich werde
zwei davon verwenden, und die Widerstände extern in eine Handtastatur
mit 12 Ziffern- und Funktions- sowie vier Richtungstasten legen. Das Schöne
an solchen AD-Wandlertastaturen ist, dass man nur sehr wenige Kabel benötigt.
Je nachdem, wie lang die als Verlängerung werden, muss man natürlich deren
eigenen Widerstand mit kalkulieren.
Wird noch eine zweite rs232 Schnittstelle
benötigt, kann der Atmega32 durch einen Atmega324 ausgetauscht werden,
da die beiden Pin-gleich sind, aber letzterer auf den Pins INT0/INT1 auch
noch die Funktionaliät von RXD2/TXD2 hat, für die lediglich noch
die Pegelwandlung fehlt, welche ich auf einem kleinen Miniplatinchen
wahrscheinlich direkt am Stecker anbringen werde.
INT0, kann auf dem Board aber auch stattdessen
für einen Interrupt von der Echtzeituhr verwendet werden, was ich aber
bei neuer Funktionalität nicht gebrauchen kann.
Ansonsten, ist das Teil mittels
extra Anschlüssen für In-System-Programming, Jtag und SPI versehen.
Die Verbindung zum raspberry, sehe ich über einen
schnellen 8-Bit Datenport, und drei Zusatzsignalen vor.
Damit bleiben die sonstigen
Signale für auch SPI, I2C und rs232 des raspberry's erst mal unberührt.
Möglicherweise, gestalte ich mir aber inside für SPI ein kleines Schmankerl, welches
bei normaler Benutzung keine Bedeutung hat. Das Raspian, kennt nämlich die Programme uisp und avrdude zur Interprocess-Programmierung der Atmegas, was, wenn
ich mit einer passendem Flachbandkabelbrücke den raspberry-spi-port
mit dem entsprechendem ICSP-Port meiner Brombeere verbinde, diese
sich eben auch einfach direkt vom raspberry aus aufpumpen lässt.
(Das ich das Brombeerboard auch vorher schon als Aufpumpboard missbraucht
hatte, erkennt man am schönen Schnappverschluss-Sockel der CPU)
Jedenfalls, - für meine Astrozwecke als Motorsteuerung, dient dies Board hauptsächlich als knüppelharte Interruptmaschine, die alles in ein exaktes
Timing von 1/2400stel Sekunde presst,
in derem Frequenzspektrum von 0 ... 2400 Hz
sich auch die Motoren genauso im gesamten Bereich
zwischen Vollgeschwindigkeit und nach-führendem
kleinst möglichem Mikroschritt mit unterschiedlichen
Frequenzen sensibel ansteuern lassen, wie alles dadurch
bereits schon vom Timing her, in eine theoretische Genauigkeit
zum Nachführen, von 2400/15 = 1/160stel Bogensekunde zwingt.
Die Johannisbeeren mit Attiny 4313
Die sitzen, (im Moment noch nicht, - aber bald),
letztendlich auf sehr kleinen Platinen
direkt bei den Motoren und sind ebenfalls mit
14,7456 Mhz getaktet und bekommen einen rs232, wie
auch einen SPI-Anschluss zur Basis. Welcher davon
benutzt wird, hängt von der für die Verbindung nötigen
Kabellänge ab und ob ich die Basis aus Him- und Brombeere
beim Motor am Montierungsfuß oder beim Motor an der Gabelseite
aufhänge. In jedem Fall wird es mindestens ein Kabel geben,
welches bis zu 2 Metern Länge bedarf. Eine dritte Johannisbeere
ist für einen eventuellen Bildfeldrotator vorgesehen.
Bei dem tippe ich aber mal auf rs232, da zumindest der Weg vom
Fuß der AZ-Achse bis zum Okular auch recht lang
werden kann.
Die generellen Aufgaben der Attinys ist es,
einmal die jeweils zwei Signale
des Encoders der betreffenden Achse zu verarbeiten und
die Kommandobefehle der großen Brombeere an
die Motoren für-, die auf ihrem gleichem Board
anwesende Holunderbeere umzusetzen.
Die Holunderbeeren, TMC 260
Dieser Chip von Trinamic, erzeugt letztendlich
die modulierten Ströme für die Motoren auch noch
in den 1/256stel Mikroschritt hinein und bedarf
dafür nur sechs Signalen von außen. Zwei sind
fürs Steppen und vier für eine SPI-Kommunikation
zum Einstellen. Letztere ist allerdings nicht
Byte orientiert, sondern pro Kommando 20 Bit lang.
Was aber nichts macht, denn dafür kann er dafür
sogar Geschwindigkeiten bis zur eigenen halben Taktfrequenz,
was auf die ultrakurze Knutschentfernung zwischen den Holunder- und
Johannisbeeren, auch keine Probleme machen sollte, aber durch
die Emulation bei 14,7456 Mhz, am Ende wahrscheinlich sowieso bei
nicht mehr wie ca. 1-2 Mbit liegen wird.
Die Johannisbeere Attiny, wird also auch eine 8 zu
20bit-Spi-Schnittstelle zur Holunderbeere sein.
Drumherum, darüber, - und was sonst noch zu erzählen wäre.
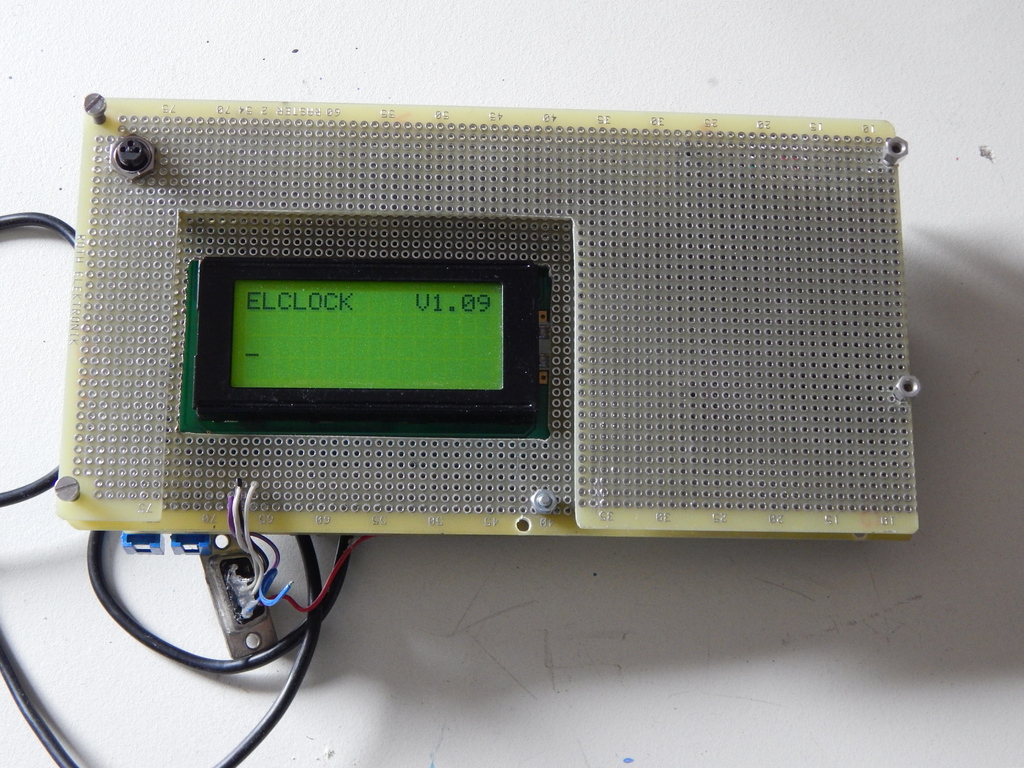
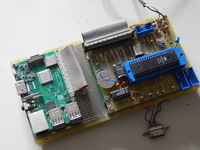 Fürs Erste, habe ich mir für die Basis aus Him- und Brombeere, mal ein solides Gerüst geschaffen, auf dem nichts mehr wackeln kann, sich aber trotzdem noch alles was fehlt oder verbunden werden muss, und dies möglichst ohne frei schwebende Kabel, - noch handlich verlöten lässt.
Fürs Erste, habe ich mir für die Basis aus Him- und Brombeere, mal ein solides Gerüst geschaffen, auf dem nichts mehr wackeln kann, sich aber trotzdem noch alles was fehlt oder verbunden werden muss, und dies möglichst ohne frei schwebende Kabel, - noch handlich verlöten lässt.
Überhaupt, - das mit den Kabeln ...
Die Verbindung zwischen Motor und Motortreiber
(Holunderbeere), z.B., sollte so kurz wie irgend möglich sein.
Das hat mit Frequenzen und Induktionen genauso viel zu tun,
wie mit Kabelwiederständen, als auch dem Umstand, dass das
Teil für den Mikroschrittbetrieb auch bei 24 Volt, mit
nicht mehr wie zehntel Volt hampeln muss.
Was eigentlich der Hauptgrund für die kleinen Dinger direkt
am Motor ist. Wobei dadurch auch direkt eine kurze Leitung
von den kleinen Johannisbeeren zu den Encodern entsteht, was aber angesichts der
geringen Frequenzen dabei, auch in längeren Versionen
kein Problem darstellen sollte. Bei verkabelten SPI-Leitungen,
die über einen Meter hinaus gehen, werde ich aber schwer nervös
und würde bereits schon bei dieser Länge, sicherheitshalber nicht
schneller als mit max. 100 - 120kHz operieren.
Mein Motor für den Antrieb der Gabel
in der Horizontalen, ist selbst aber nicht auf der
Gabel befestigt, sondern am generellem Fuß der
Montierung und treibt von da aus die Gabel an.
Was bei 360 Grad den Effekt hat, dass für eine
Achse hierfür ein Kommunikationskabel, von CPU zu CPU, bis
zu einer Länge von 2 Metern nötig ist. Zu unsicher
für SPI, also wird diese Strecke auf jeden Fall per rs232 mit Pegelwandlung
und einer Geschwindigkeit von evtl. 115,2 KBps überbrückt.
Da ich nicht vorhabe, beim Steuern und Beobachten
mit einem CPU-Kasten und mächtig Kabeln in der Gegend rum zu hampeln, sondern
ein kleines handliches Handpad mit nicht mehr wie den nötigen Tasten
zur zwar nicht ganz kabellosen- aber lediglich nur dünnem Kabelstrang
mit auch nur drei Adern zur Fernbedienung bevorzuge, wird rs232 nicht
für alles nötig sein, - aber auch dies wäre zur Not möglich.
Bei der vorgesehenen Bedienung, wird die Basis entweder am Fuß
der Montierung oder an der Gabelseite aufgehängt oder angesteckt werden.
Dies auch deshalb, um die Menge
an-, per Motorbewegung mit geschleifter Kabel auf dem
Minimum des Kommunikationskabels und der 5- wie 12/und/oder
24 Volt Leitung für die Spannungsversorgung der Motortreiber
zu halten. Da es in unmittelbarer Nähe eines Motors und seiner
Johannis- und Holunderbeere zur Verkabelung nicht mehr als max.
30cm benötigt, kann ich die dortige Johannisbeere also auch per
SPI ansteuern.
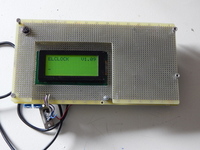 Wie man sieht, habe ich mir zusätzlich noch gut Platz über den Bedarf hinaus, für evtl. zukünftige Erweiterungen geschaffen. Was allerdings das Gehäuse ganz zum Schluss, bereits jetzt schon zu einer interessanten Herausforderung (Laubsägearbeit?) werden lässt, aber ich hab so Zeugs lieber im Gehäuse, als viele angeschlossene kleine Kästen, die es zum Löten auch alle zu öffnen gilt. Die versenkte LCD-Anzeige, hat damit aber nichts zu tun, sondern wird bewusst später entsprechend eingerahmt werden. LCD-Anzeigen sind für den Sterngucker immer zu hell, aber ist im Dunkeln die Hintergrundbeleuchtung aus, sieht man eben auch nix. (An- abschalten, ist per Software über einen Transistor möglich) Die ist mit entsprechendem Widerstand zwar schon so schwach wie möglich, trotzdem macht es Sinn, sie noch so zu versenken, dass wenigstens seitlich kein störendes- oder gar Streulicht entsteht. Beim Rudelspechteln z.B., reicht es ja nun wirklich, wenn nur der im Licht badet, der auch sein Display sehen will. Eingerahmt, hat man aber auch mehr Möglichkeiten, sie mit farbigen Abdämpffolien abzudecken, ohne die ständig mit Tesa fest kleben zu müssen.
Wie man sieht, habe ich mir zusätzlich noch gut Platz über den Bedarf hinaus, für evtl. zukünftige Erweiterungen geschaffen. Was allerdings das Gehäuse ganz zum Schluss, bereits jetzt schon zu einer interessanten Herausforderung (Laubsägearbeit?) werden lässt, aber ich hab so Zeugs lieber im Gehäuse, als viele angeschlossene kleine Kästen, die es zum Löten auch alle zu öffnen gilt. Die versenkte LCD-Anzeige, hat damit aber nichts zu tun, sondern wird bewusst später entsprechend eingerahmt werden. LCD-Anzeigen sind für den Sterngucker immer zu hell, aber ist im Dunkeln die Hintergrundbeleuchtung aus, sieht man eben auch nix. (An- abschalten, ist per Software über einen Transistor möglich) Die ist mit entsprechendem Widerstand zwar schon so schwach wie möglich, trotzdem macht es Sinn, sie noch so zu versenken, dass wenigstens seitlich kein störendes- oder gar Streulicht entsteht. Beim Rudelspechteln z.B., reicht es ja nun wirklich, wenn nur der im Licht badet, der auch sein Display sehen will. Eingerahmt, hat man aber auch mehr Möglichkeiten, sie mit farbigen Abdämpffolien abzudecken, ohne die ständig mit Tesa fest kleben zu müssen.
Doch zurück zum Thema, - die Kommunikationsgeschwindigkeiten, mögen dem einen
oder anderem vielleicht gering erscheinen, da ich anfangs
ja von großen Fließkommazahlen sprach. Nun, - das mathematische Zeugs,
bleibt einzig und alleinig im raspberry, welcher dementsprechend
alles andere per 1Byte Operationsbefehlen steuert. Belangt die
letztendliche Motorsteuerung also überhaupt nicht.
Nach mehreren entsprechenden Tests, kann ich mit reinem Gewissen behaupten,
dass die Himbeere schnell genug ist, alle nötigen Berechnungen
mindestens über hundert mal in einer 1/2400stel Sekunde auszuführen, während
sie das in dieser Zeit aber nur einmal machen muss. Die parallele
Kommunikation zwischen Himbeere und Brombeere muss
dabei kaum berücksichtigt werden, da die oberhalb von einem MByte
liegen wird. Aber auch dies, wird bei laufendem Motor dem Takt und
der Synchronisation auf 2400 mal in der Sekunde entsprechend
ablaufen, während zwischen Brombeere und den Johannisbeeren
pro 1/2400stel Sekunde immer nur ein Byte gesendet und empfangen
wird. Da bei 100kHz aber minimum auch immer bis zu 10000 Byte pro
Sekunde übertragen werden können, würde das bei 2400 pro Sekunde,
selbst dann noch immer; "in time", ohne Überläufe oder sonstigem geschehen,
wenn man annehmen würde, dass bei zwei Motoren dabei vier Bytes
hintereinander verschickt würden. Sinnigerweise, geht das durch die parallel
arbeitenden Schiftregister des Atmegas aber gleichzeitig
über zwei Schnittstellen. Selbst die Sendung und den Empfang
könnte man noch lediglich um ein Bit verschoben parallelisieren,
- was aber genauso wenig sein muss, wie gleichzeitig beantwortete
gestellte Fragen, einfach ihre Tücken haben können. Letztendlich,
sind aber auch das nur worst-case Überlegungen für sehr schlechte
Kabelqualitäten oder/und Umgebungsstörungen. Alle über
längere Kabel kommunizierenden Cpu's sind gleich getaktet und
die Atmegas lassen bei 14,7456 Mhz generell, für rs232 die doppelte
Geschwindigkeit von 230,4 Kbps, also 460,8 bei 0 Prozent Fehlerrate
zu. Bezüglich SPI und kurzen Leitungen, darf man da ähnlich
denken.
Die Cpu's sind jedenfalls dadurch sowieso nicht belastet, sondern
brauchen nur Register zu beschreiben oder auszulesen, während
die vier Bytes selbst bei 115,2 nicht mal die Hälfte eines 1/2400stel Zyklus
benötigen, um durch die Kabel zu segeln. Das von den kleinen
Johannisbeeren zurück gesendete Byte,
wird übrigens den von ihr selbst gezählten Wert fürs Encodersignal enthalten
und in drei aufeinanderfolgende Bytes aufgesplittet sein. Was dann
800 Werten in der Sekunde entspricht, die im motorisiertem
Betrieb selbst bei Höchstgeschwindigkeit (1,5 Grad bei einer
Encoderauflösung von ca. 16,2 Bogensekunden) immer noch mehr als doppelt
so schnell abgefragt ist, wie sich bei laufendem Motor ein Signal ändern könnte.
Der Interrupt im Atmega32 wird noch einen eigenen Teiler haben,
mit dem man Schrittfrequenzen einstellen kann. (Im Voll- oder
Halbschrittbetrieb, sollte man z.B. nicht mit 2400 Steps heizen,
aber 1200 vertragen eigentlich alle.) Was aber nicht
bedeutet, dass nicht jedes der Attinys trotzdem jede 1/2400stel
Sekunde ein Byte erhält und eines zurück senden muss. Es wird
lediglich per Inhalt des Bytes die Holunderbeere entsprechend der
Frequenz steppen und evtl. die Schrittart ändern. Bei beidem,
wie auch beim Stoppen, sehe ich übrigens vor, dies immer nur
dann zu machen, wenn eine Vollschrittposition erreicht ist.
Das gibt nicht nur Schrittpositionssicherheit, sondern ermöglicht
auch ein überschaubares Rasterhandling zwischen allen benötigten
Frequenzen für alle benötigten Schrittarten für auch alle benötigten
Zwecke inklusive Beschleunigung und Abbremsen.
Was natürlich alles
nur die Situationen betrifft, wo die Motoren laufen.
Konfigurationen und Sonstiges, bzw. auch die Abfrage der
Encoder im manuellem Positionierbetrieb, muss sich nicht an diesen
Zeittakt halten, der aber immer noch mehr als genug Platz
ließe, auch das LCD-Display mit Leben zu füllen. Dessen
4Bit-Schnittstelle mit einer Zykluszeit von 500 Nanosekunden
sollte noch mehr als genug rein passen, - aber da das Teil
jetzt nichts relevantes für die Steuerungsfunktionalität
ist, kann das auch ein Hauptprogramm im Atmega32 machen.
Ist ja nicht so, dass die Brombeere nur aus einem Interrupt
besteht, der zudem nicht mal viel machen muss.
Irgendwas, darf ja auch ruhig interruptet werden.
Hauptsache, - er selber nicht.
Der Interrupt wird übrigens eines der Signale zum
raspberry betätigen und damit genauso ein Sperrflag
für den Zugriff setzen, wie den raspberry mit sich
synchronisieren, - welcher darob nur dann seine
Kommunikation mit dem Hauptprogramm des Atmegas; "in time"
tätigt, bevor der nächste Interrupt los geht und darob
der Interrupt dann genauso die aktuellen Befehle vom raspberry hat,
wie der vorher die vom Hauptprogramm ausgelesenen Register
der empfangenen Bytes über rs232 oder Spi.
Klingt verzwickt, - hat aber genauso seine Gründe, wie unsereiner
jetzt endlich mit dem Löten und Programmieren des Früchtekuchens beginnen sollte.
Kleiner Nachtrag
Damit durch meine Begeisterungsfähigkeit keiner seiner Himbeere Schaden
zufügt, möchte ich darauf hinweisen, dass ich vergessen habe zu erwähnen,
dass die Portsignale der raspberry 3.3 Volt Geschichten sind, die als Eingänge
nicht tolerant zu den Ausgängen von den 5Volt-Versionen
meiner Atmegas sind. Also nicht einfach so verbinden, sondern schon
eine Pegelwandlung mindestens für die 5V-Ausgänge zu 3V3-Eingängen vom
raspberry dazwischen bauen. Ich selber, sehe für meine Datenschnittstelle
die bewährten Puffer der Marke 74LVTH245 vor.
Update: 20.12.18
Der vormals erwähnte Attiny 2313 wird durch den Attiny4313 ersetzt.
Der ist vollkommen gleich, hat aber doppelt so viel Speicher wie der 2313
mit nur 2Kb Flashspeicher. (Bin bei 3,5 kb angelangt dafür :-)

|
0 Kommentare
Motivation
Vorheriger Artikel
Übersicht
Startseite
Galerie
Nächster Artikel
Impressum
|
| Blogs
aebby LOG
endless.good.news
Fliegende Bretter
Im Bockshorn
Ian Musgrave's Astroblog
Thursday July 23 to Thursday July 30
Psiram
Kreativ-Links
Bildgrund11
Exportabel
Comiclopedia
gnaddrig ad libitum
Europ. Märchengesellschaft
Kunstverein Freiburg
Markus Waltenberger
Textem-Kulturgespenster
Maf Räderscheidt
Lothar Thiel
Tell
ZAZA
Astro-Links
W. Stricklings Astro-Homepage
Astronomie.de
Selbstbau Armin Endt
Selbstbau Reiner Vogel
Selbstbau T. Klotzbücher
Lehrreiche Perlen der auch Begeisterungsförderung
Bärtierchen
Schleimpilze
|