| | Kategorien
Comic-Art ...
Special Pin-Ups, ...
Surreale Sichten, ...
Reale Sichten, ...
Cartoons, ...
Karikaturen, ...
Unsortiert, Zeichnungen, ...
Textblumen, ...
Der Kirchenplanet.
Spezielle Streifzüge.
Quick and dirty.
Märchenhaftes
Dark worlds.
Bürgerlich Anständiges.
Kunst vom Nachwuchs.
Texte ...
Artikel ...
Kosmisches ...
Hintergrundrauschen ...
Achtung, Wääärbung ...
Sonstiges ...
Übersicht
Aktueller Beitrag

Add-ons
Selbstbauteleskope
Raumfahrtkatalog
Veröffentlichtes


|
|
Motivation
Vorheriger Artikel
Übersicht
Startseite
Galerie
Nächster Artikel
Impressum
01.03.2019 von eb
, - Aktuelle Bilder
Jubelprosa im Früchtegarten
Klick macht alle Bilder größer
 Ich liebe es, wenn ein Plan funktioniert. Ich weiß, - ganz blöder Spruch. Angebrachter wäre wohl, - was lange währt, wird endlich gut. Sei's drum, - man freut sich einfach, wenn sich am Ende herausstellt, dass die ganze Theorie auch praktisch klappt. Will meinen, - der Fruchtsalat fürs motorisierte Scope ist angemacht und das Vorkosten aller wichtigen Funktionalitäten, trifft voll den zumindest eigenen Geschmack.
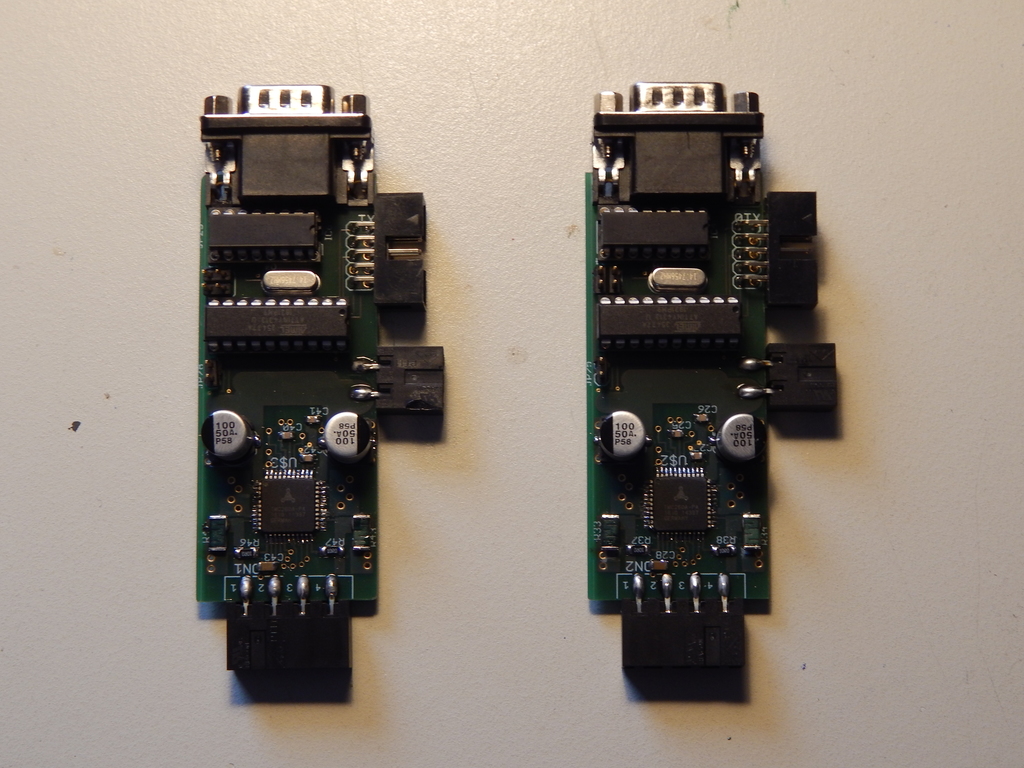
Platinenherstellung und Aufbau nach dem eigenem Rezept, ähhh, Schaltplan, waren sogar problemloser wie gedacht. Um genau zu sein, bis auf die üblichen Verbrennungen am Lötkolben, Hustenanfälle ob edler Lötzinndämpfe, sowie vorschnellen Fehleinkäufen an Bauteilen, gab es überhaupt keine Probleme. Auflöten-, anschließen und den bereits schon vorgefertigten Teil an Software zum Testen zu verwenden, haben lediglich die üblichen Softwarefehler allzu hastiger Finger gezeigt, welche mit mehr oder weniger starken Nerven-zusammenbrüchen behoben werden konnten. Wobei erwähnt werden sollte, das diese Trockenprogrammiererei der Grundfunktionalitäten, für alle vier CPU-Schaltungen, eigentlich ebenfalls gerade mal ein Drittel des Gesamtbedarfes eingenommen hat. Der etwas unverhältnismäßig verbratene Zeitaufwand für die bisherige Gesamtsoftware, erklärt sich über den großen Rest an reinen Konfigurationsmöglichkeiten für die Wünsche nach der eierlegenden Wollmilchsau spezieller Anhänger des Satzes; "Will ich auch haben, - natürlich für lau und alles um den Faktor 10 besser und gleichzeitig unkomplizierter, wie alles, was ich von der Stange kriegen könnte". Die Welt ist bescheiden und immer zu einem Scherzchen aufgelegt. Was soll's, - ohne einen kräftigen Griff nach unten, wird das nicht über den Bierkasten gereicht und was die Konfiguration betrifft, hab ich immer noch die Wahl, zwischen einem zweiten Kasten, oder einer aufwändigen Beschreibung der Konfiguration und ihrer Möglichkeiten. Doch stellen wir den Bierkasten mal beiseite, - und bleiben beim Thema.
Ich liebe es, wenn ein Plan funktioniert. Ich weiß, - ganz blöder Spruch. Angebrachter wäre wohl, - was lange währt, wird endlich gut. Sei's drum, - man freut sich einfach, wenn sich am Ende herausstellt, dass die ganze Theorie auch praktisch klappt. Will meinen, - der Fruchtsalat fürs motorisierte Scope ist angemacht und das Vorkosten aller wichtigen Funktionalitäten, trifft voll den zumindest eigenen Geschmack.
Platinenherstellung und Aufbau nach dem eigenem Rezept, ähhh, Schaltplan, waren sogar problemloser wie gedacht. Um genau zu sein, bis auf die üblichen Verbrennungen am Lötkolben, Hustenanfälle ob edler Lötzinndämpfe, sowie vorschnellen Fehleinkäufen an Bauteilen, gab es überhaupt keine Probleme. Auflöten-, anschließen und den bereits schon vorgefertigten Teil an Software zum Testen zu verwenden, haben lediglich die üblichen Softwarefehler allzu hastiger Finger gezeigt, welche mit mehr oder weniger starken Nerven-zusammenbrüchen behoben werden konnten. Wobei erwähnt werden sollte, das diese Trockenprogrammiererei der Grundfunktionalitäten, für alle vier CPU-Schaltungen, eigentlich ebenfalls gerade mal ein Drittel des Gesamtbedarfes eingenommen hat. Der etwas unverhältnismäßig verbratene Zeitaufwand für die bisherige Gesamtsoftware, erklärt sich über den großen Rest an reinen Konfigurationsmöglichkeiten für die Wünsche nach der eierlegenden Wollmilchsau spezieller Anhänger des Satzes; "Will ich auch haben, - natürlich für lau und alles um den Faktor 10 besser und gleichzeitig unkomplizierter, wie alles, was ich von der Stange kriegen könnte". Die Welt ist bescheiden und immer zu einem Scherzchen aufgelegt. Was soll's, - ohne einen kräftigen Griff nach unten, wird das nicht über den Bierkasten gereicht und was die Konfiguration betrifft, hab ich immer noch die Wahl, zwischen einem zweiten Kasten, oder einer aufwändigen Beschreibung der Konfiguration und ihrer Möglichkeiten. Doch stellen wir den Bierkasten mal beiseite, - und bleiben beim Thema.
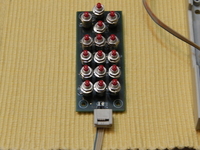


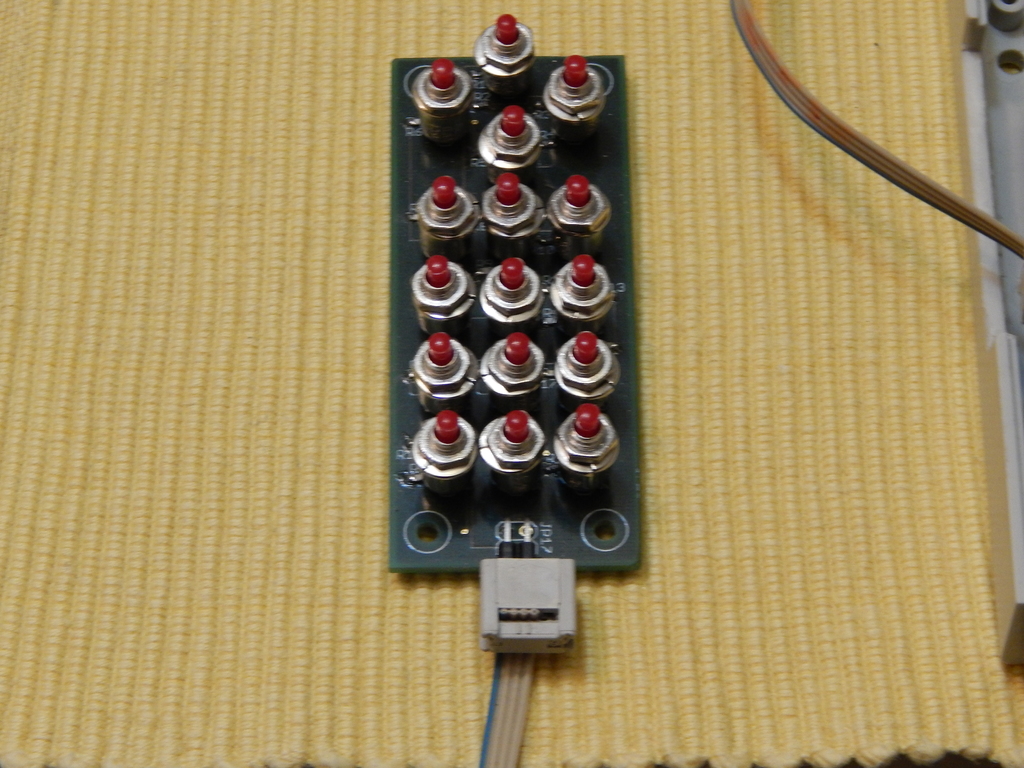
Tatsächlich, ist es eine recht flexibel einsetzbare und auch modulare Geschichte geworden, die für bis zu fünf verschiedene Gerätekonstellationen konfiguriert werden kann. Dies kann entweder mittels der kleinen Handtastatur, (mit der lässt sich sogar bedingt schreiben), oder per Editor direkt an einer Konfigurationsdatei im Textformat geschehen. Eine, ebenfalls per Tastatur oder Editor bearbeitbare Liste für bis zu hundert himmlischer Objekte zum Anfahren, Nachführen, Justieren ist auch vorhanden. Das Hauptmenü für den Spaß in der Nacht, hat die Punkte "Targets", "Manual Move", "Autoscope" und "Encodermode". Die letzten drei, sind natürlich nur je nach Konstellation auswählbar. Will meinen, gibt's keine Motoren und nur Encoder, ist auch nur letzteres,- bzw. gibt's keine
Encoder, sind nur "Manual Move" und "Autoscope" benutzbar.
"Targets", meint die Auswahl der Koordinaten eines Zielobjektes zum Anfahren oder Vergleichen, und lässt sich aus besagter Liste auswählen oder manuell eingeben. "Autoscope", - meint automatisches Anfahren mit Beschleunigungs- und Bremsrampen solch einer Zielkoordinate mit automatischer Nachführung im kleinst möglichen Mikroschritt und Korrekturmöglichkeit über die Richtungstasten der kleinen Handtastatur. "Manual Move", - meint motorisiertes Fahren in der Weltgeschichte herum, - mittels der Richtungstasten
mit zunehmender Beschleunigung je länger man die Richtungstaste hält. "Encodermode", - ist die Geschichte fürs motorlose Fahren per Hand durch den Himmel, aber mit trotzdem ablesbaren Ist- und (wenn über "Targets" ausgewählt), eben auch Annäherungs,-bzw. Zielkoordinaten. Zwischen "Autoscope" und "Manual Move", kann man zudem per Tastendruck switchen und alle Optionen haben eine Justiertaste, die- wenn das ausgewählte Objekt in der Bildmitte ist, das ganze Gerät danach justiert. Die Koordinatenansichten des LCD-Displays, ("ist-" bzw. auch "soll"-Koordinaten, falls Zielobjekt) kann per Taste dafür, zwischen AZ/ALT in Grad oder Bogensekunden, bzw. auch RA/DEC umgeschaltet werden.
Das nächste wichtige Menü dient der Programmsteuerung und die restlichen vier-, mit weitaus mehr Dingen zum auswählen, sind, - naja, - reine Konfigurationsmöglichkeiten bis auch zum Setzen der Zeit für die Echtzeituhr. Es ist zwar alles als Menüpunkte schon vorhanden und funktionsfähig, aber das alles zu beschreiben, ist jetzt einfach noch zu früh, bzw. liegt Erklärungs-technisch, bisher auch nur als raw-hack im Denglischem für mich selber vor. Zudem gibt es noch die Lästigkeit, dass mit der Zeit immer neue Ideen dazukommen. Mittlerweile, gehört dazu auch eine sehr einfach selbst zu lötende Schaltung für ein DCF77-Funkmodul, welches man ebenfalls fürs hyper-genaue Setzen der Echtzeituhr verwenden- und bei Bedarf an den kleinen Erweiterungsport der Brombeere anstecken könnte. (Das muss aber keine neue Frucht sein, sondern fällt unter die Rubrik Süßstoff für den Fruchtsalat). Im Moment, liegt die Konzentration noch ausschließlich auf Dobson, aber die weitere Planung-, wie auch schon erste Softwareangleichungen dafür, sehen auch parallaktische Montierungen vor. (Wie beim Dobson, alle drei Möglichkeiten, - sprich; nur Motoren, nur Encoder oder beides) Man weiß nie, wie viel verschiedene Geräte man mit einer Steuerung bedienen will und bis zu fünf sind-, wie bereits erwähnt, dann einfach bequem umschaltbar. Ein einfaches X-Drive für z.B. eine RA-Achse ist auch vorgesehen. Die wird dem Standartantrieb einer parallaktisch ausgerichteten Montierung und den unzählbaren Bastelmöglichkeiten für z.B. nachgeführte Kameras etc. usw. usf. gewidmet. Das stelle ich aber erst mal alles zurück, bis die momentane Version 1.0 auch wirklich voll durch getestet ist.
 Die Grenzen und alle Einstellmöglichkeiten der Schrittmotortreiber (Holunderbeere), muss ich stellenweise auch noch bis ins Mark testen. Im Moment, sind die einfach mal bis auf weiteres auf Motoren mit 1 Ampere pro Phase begrenzt und entsprechend mit 220-Milliohm-Sense-Wiederständen bestückt, - wobei ich selber nicht mal daran denke, darüber hinaus zu wollen, aber grundsätzlich kann das bis zu 2 Ampere.
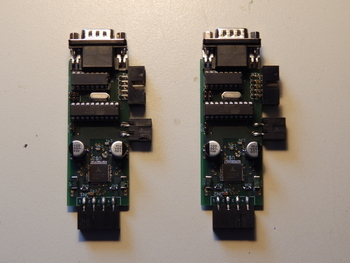
Zudem spricht ebenfalls nichts dagegen, meine Software- und Kommunikations-schnittstelle per Atmega 4313 (Johannisbeere), auf den Schrittmotor-Platinen, nicht auch für andere Schrittmotor-treiber zu adaptieren. Ich habe diesbezüglich schon meine alte 6219er Schaltung als Preißelbeere im Hinterkopf, die man vielleicht auch noch für was einsetzen könnte. Auch wenn die nicht mehr wie 1/8tel Mikroschritt kann, muss sie dennoch nicht verstauben. Muss aber nicht sein und gehört ebenfalls erst mal zu den späteren Dingen welche man angehen kann.
Obergrenzen für Mikroschritt, sind sowieso per Konfiguration einstellbar, da die Geschichte mit dem 256stel Mikroschritt u.U. auch abhängig davon ist, ob man 24 Volt dran hängt, oder nur 12 Volt aus der Autobatterie saugen kann/will. Alles in allem, - greif ich jetzt aber maßlos vor, denn da gibt es noch einiges zu testen und programmierend zu verschönern, bis ich zufrieden bin. Im Moment ist aber bereits sicher, dass alle Funktionalitäten meines bisherig theoretischen Konzeptes auch praktisch funktionieren. Alle Beeren, schwätzen, rechnen und steuern mittlerweile wie die Weltmeister miteinander, und das auch problemlos 2400 mal pro Sekunde, bzw. dies auch über längere Leitungen hinweg. Die theoretische Genauigkeit, liegt damit weit über die 1/100stel Bogensekunde hinaus und die praktisch mechanische, (naja, - im Moment immer noch eher theoretisch), läge im 256stel Mikroschritt bei meinem Heilands-Dobson, so ca. bei 0,018 Bogensekunden. Selbst wenn ich aus welchen Gründen auch immer, auf den 128stel Mikroschritt runter müsste, wäre das mit 0,036 Bogensekunden Genauigkeit, für mich noch vollkommen im grünen Bereich.
Die Grenzen und alle Einstellmöglichkeiten der Schrittmotortreiber (Holunderbeere), muss ich stellenweise auch noch bis ins Mark testen. Im Moment, sind die einfach mal bis auf weiteres auf Motoren mit 1 Ampere pro Phase begrenzt und entsprechend mit 220-Milliohm-Sense-Wiederständen bestückt, - wobei ich selber nicht mal daran denke, darüber hinaus zu wollen, aber grundsätzlich kann das bis zu 2 Ampere.
Zudem spricht ebenfalls nichts dagegen, meine Software- und Kommunikations-schnittstelle per Atmega 4313 (Johannisbeere), auf den Schrittmotor-Platinen, nicht auch für andere Schrittmotor-treiber zu adaptieren. Ich habe diesbezüglich schon meine alte 6219er Schaltung als Preißelbeere im Hinterkopf, die man vielleicht auch noch für was einsetzen könnte. Auch wenn die nicht mehr wie 1/8tel Mikroschritt kann, muss sie dennoch nicht verstauben. Muss aber nicht sein und gehört ebenfalls erst mal zu den späteren Dingen welche man angehen kann.
Obergrenzen für Mikroschritt, sind sowieso per Konfiguration einstellbar, da die Geschichte mit dem 256stel Mikroschritt u.U. auch abhängig davon ist, ob man 24 Volt dran hängt, oder nur 12 Volt aus der Autobatterie saugen kann/will. Alles in allem, - greif ich jetzt aber maßlos vor, denn da gibt es noch einiges zu testen und programmierend zu verschönern, bis ich zufrieden bin. Im Moment ist aber bereits sicher, dass alle Funktionalitäten meines bisherig theoretischen Konzeptes auch praktisch funktionieren. Alle Beeren, schwätzen, rechnen und steuern mittlerweile wie die Weltmeister miteinander, und das auch problemlos 2400 mal pro Sekunde, bzw. dies auch über längere Leitungen hinweg. Die theoretische Genauigkeit, liegt damit weit über die 1/100stel Bogensekunde hinaus und die praktisch mechanische, (naja, - im Moment immer noch eher theoretisch), läge im 256stel Mikroschritt bei meinem Heilands-Dobson, so ca. bei 0,018 Bogensekunden. Selbst wenn ich aus welchen Gründen auch immer, auf den 128stel Mikroschritt runter müsste, wäre das mit 0,036 Bogensekunden Genauigkeit, für mich noch vollkommen im grünen Bereich.
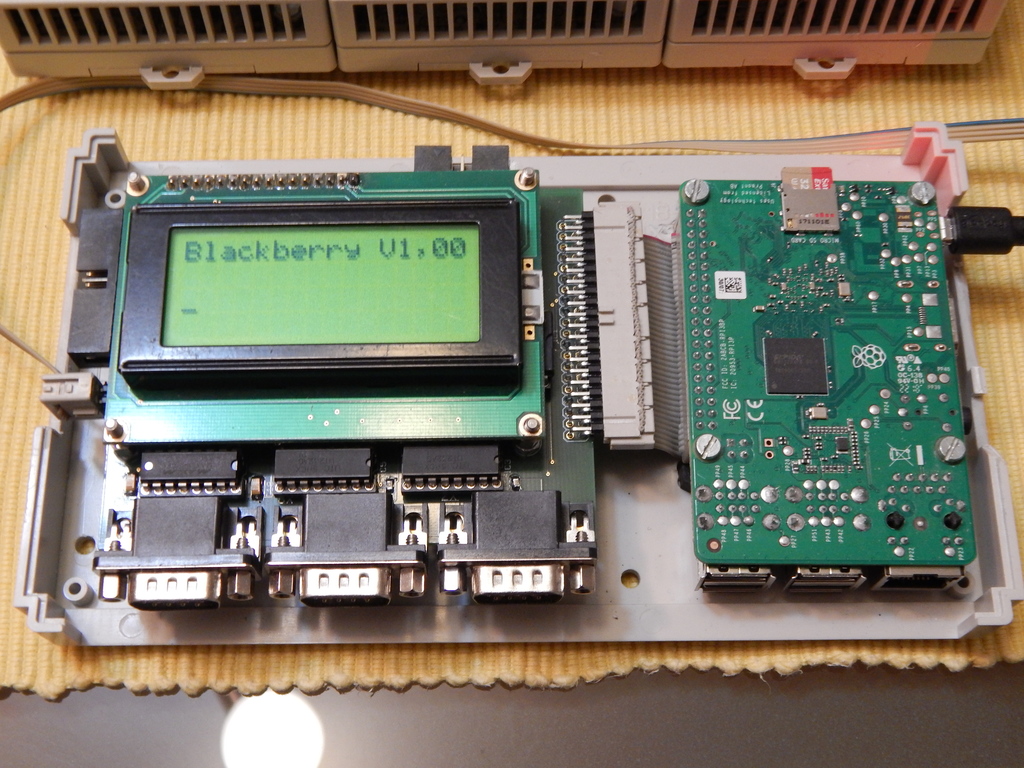
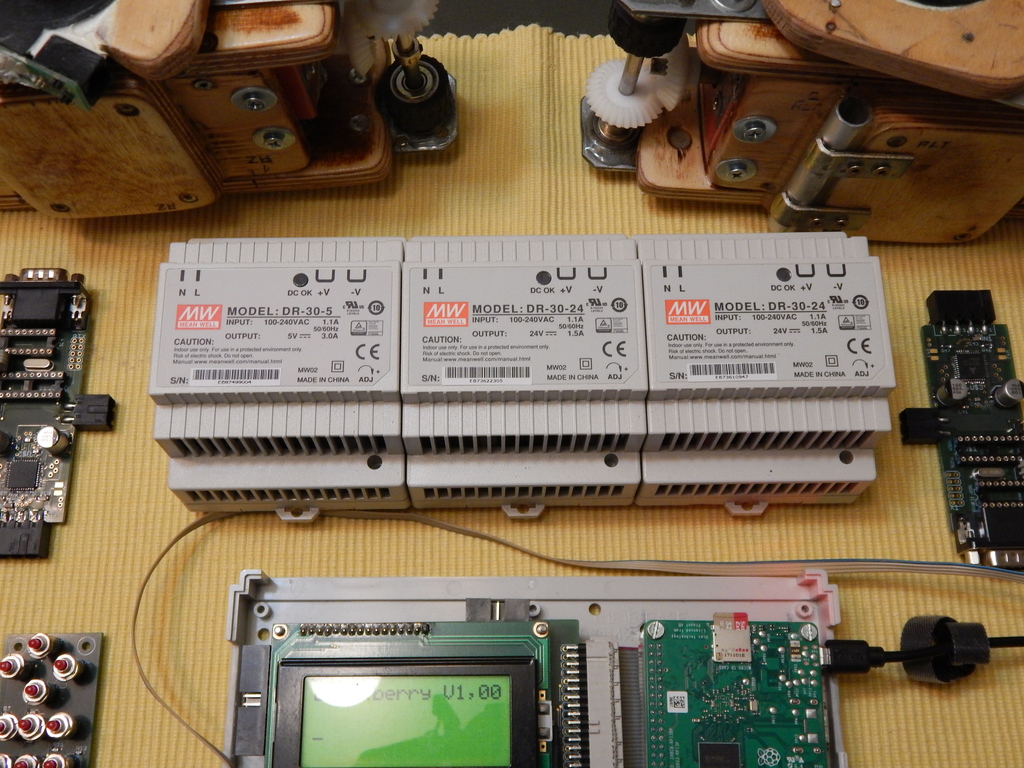
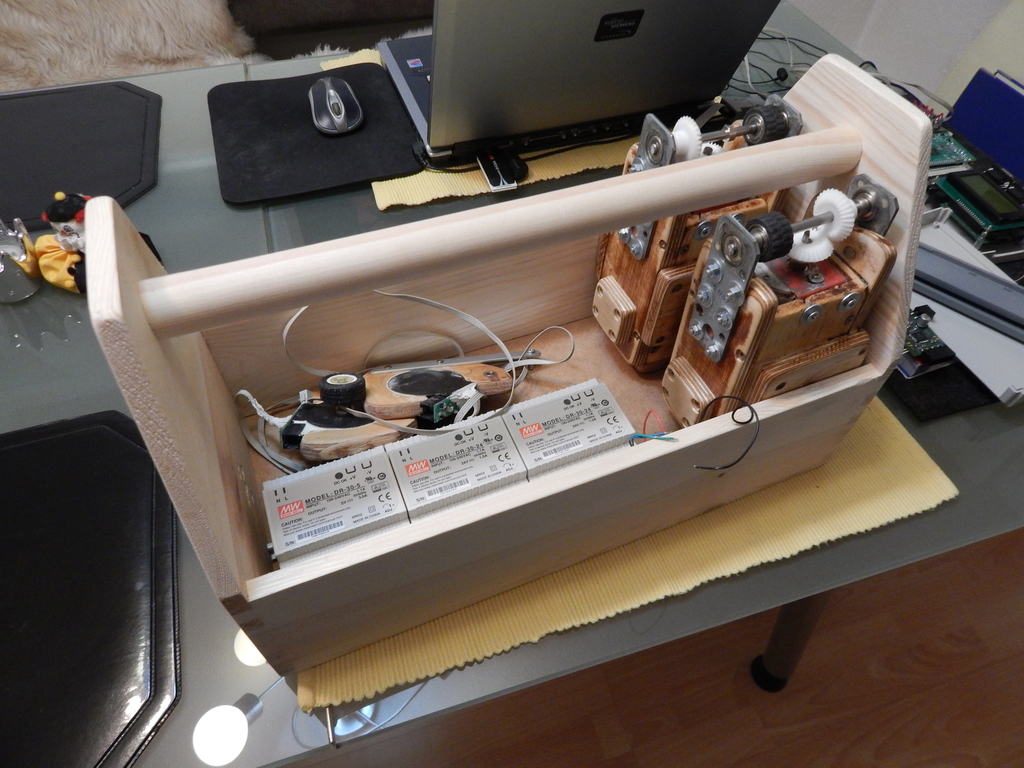
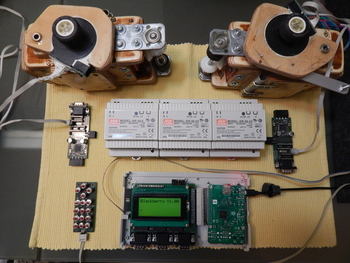
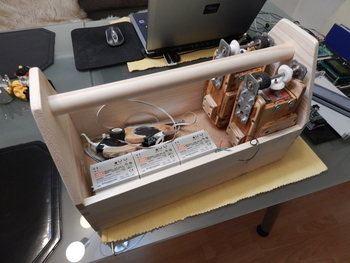 Mal ganz davon abgesehen, dass Handtastatur und Motortreiber-Platinen natürlich auch noch ein passendes Gehäuse benötigen,
hab ich fürs weitere Vorgehen, Testen etc. usw. usf. jedenfalls schon mal ein kleidsames Handtäschchen gefunden. Das werde ich tatsächlich auch für die Steuerung verwenden, - und zwar in der Form, dass Netzteile und die Steuerung aus Him- und Brombeere darin in einen gemeinsamen geschlossenen Raum mit Dachschräge für die Steuerung mit LCD-Anzeige verfrachtet werden, während für Motoren, Encoder und Kabel, immer noch genug Platz zum Transportieren ist. Ich verspreche mir auf dem Weg, durch die Netzteile genügend Abwärme, um die Steuerung auch im Winter auf Betriebstemperatur halten zu können, während es für die heißeren Jahreszeiten eine Lüftungsluke geben wird. Sollte es in besonders kalten Nächten doch nicht mit der Wärme reichen, weiß der unkonventionelle Bastler aber immer noch, wie man aus Festspannungsreglern sehr kleine und sehr preiswerte Öfchen herstellt, bevor man aufwändig mit Peltier-Elementen anfängt zu hantieren. Ähnliches, muss für den Winter auch bezüglich der kleineren Motortreiber-Platinen überlegt werden, aber das hat auch noch etwas Zeit. Generell, geht's jetzt erst mal ans Software-Schleifen, Feintuning der Holunderbeere und überhaupt Endjustierung der Motoren, - beides trocken und/oder am Gerät selber.
Mal ganz davon abgesehen, dass Handtastatur und Motortreiber-Platinen natürlich auch noch ein passendes Gehäuse benötigen,
hab ich fürs weitere Vorgehen, Testen etc. usw. usf. jedenfalls schon mal ein kleidsames Handtäschchen gefunden. Das werde ich tatsächlich auch für die Steuerung verwenden, - und zwar in der Form, dass Netzteile und die Steuerung aus Him- und Brombeere darin in einen gemeinsamen geschlossenen Raum mit Dachschräge für die Steuerung mit LCD-Anzeige verfrachtet werden, während für Motoren, Encoder und Kabel, immer noch genug Platz zum Transportieren ist. Ich verspreche mir auf dem Weg, durch die Netzteile genügend Abwärme, um die Steuerung auch im Winter auf Betriebstemperatur halten zu können, während es für die heißeren Jahreszeiten eine Lüftungsluke geben wird. Sollte es in besonders kalten Nächten doch nicht mit der Wärme reichen, weiß der unkonventionelle Bastler aber immer noch, wie man aus Festspannungsreglern sehr kleine und sehr preiswerte Öfchen herstellt, bevor man aufwändig mit Peltier-Elementen anfängt zu hantieren. Ähnliches, muss für den Winter auch bezüglich der kleineren Motortreiber-Platinen überlegt werden, aber das hat auch noch etwas Zeit. Generell, geht's jetzt erst mal ans Software-Schleifen, Feintuning der Holunderbeere und überhaupt Endjustierung der Motoren, - beides trocken und/oder am Gerät selber.
Dabei hoffe ich, auch einigermaßen brauchbare Beschreibungen und Bedienungsanleitungen hin zu bekommen. Was aber davon abhängt, wie viel Nachbau-Interesse vorhanden- und welche Grundlagen eventuelle Interessenten mit bringen. Eventuell, würde das ja nicht mal wenige Zusatz-Beschreibungen auch zum Aufbau erfordern, z.B. - wie man die Software in die Prozessoren pumpt, - oder wie auch Lesebrillenträger ein TQFP-Gehäuse gelötet bekommen, - etc. usw. usf. Zudem müsste ich mir dann auch noch eine
zusätzliche Installations- oder/und Konfigurationsstrategie für mein Programm auf dem Raspberry überlegen. Das hat was mit der Multiprozess-Umgebung und den Multimediafähigkeiten des Betriebssystems-, sowie der Vorliebe von Besitzern zu tun, dass auch in der sternklarsten Nacht, unbedingt alles genauso gleichzeitig ausreizen zu wollen, wie leere Ports nicht einfach auch mal leer lassen zu können. Schwieriges-, aber zumindest für mich, im Moment noch kein Thema. Wir werden sehen, - entscheidet aber auch darüber, wie ich Firmware, Dokumentationen und sonstig diesbezüglichen Schmodder weiterreiche. Eventuelles Interesse, außerhalb des eigenen Bierkasten-Dunstkreises, kann aber per email bekundet werden.
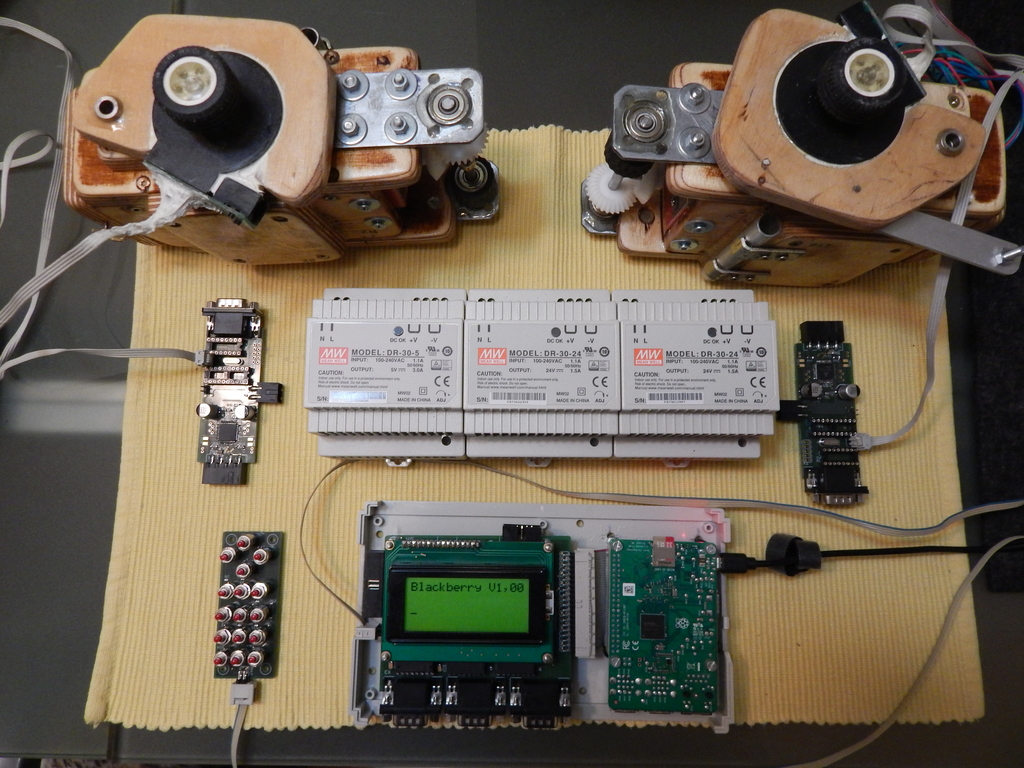
Zum Abschluss, noch zwei Pornos mit tanzenden und laufenden Motoren. Der erste ist aus einem Versuch heraus, die Schrittmotortreiber so herunter zu tunen, dass sie auch noch ältere Kleinmotoren, die nicht mehr wie 500mA pro Phase vertragen, bedienen zu können, ohne sie dabei zu grillen. Hat eigentlich ganz gut geklappt, - wenn sie auch ein bisschen heiß dabei geworden sind. Der zweite, zeigt die Konstellation mit meinen fürs Scope verwendete Motoren. Dabei wird vorher ein Himmelsobjekt als Zielobjekt aus der Liste ausgesucht und dann über den Menüpunkt "Autoscope" automatisch angefahren. Die Motoren beschleunigen dabei, je nach Entfernung zwischen Ziel- und Ist-Position,
über eine Anfangsrampe bis zur Höchstgeschwindigkeit und rampen vorher
wieder runter, bis in den kleinst möglichen Mikroschritt und damit wird
dann das Objekt automatisch nachgeführt.
Dancing engine
AUTOSCOPE
Alles in allem, bin ich sehr zufrieden, weil es einfach funktioniert und nur noch Tests, Angleichungen, Tuning und Softwarearbeit zum Verbraten der kargen Freizeit benötigt. Kurzum, - demnächst wieder mehr und auch wieder anderes, bzw. gemischter, auf diesem Kanal hier.
|
3 Kommentare
Motivation
Vorheriger Artikel
Übersicht
Startseite
Galerie
Nächster Artikel
Impressum
|
| Blogs
aebby LOG
endless.good.news
Fliegende Bretter
Im Bockshorn
Ian Musgrave's Astroblog
Thursday July 23 to Thursday July 30
Psiram
Kreativ-Links
Bildgrund11
Exportabel
Comiclopedia
gnaddrig ad libitum
Europ. Märchengesellschaft
Kunstverein Freiburg
Markus Waltenberger
Textem-Kulturgespenster
Maf Räderscheidt
Lothar Thiel
Tell
ZAZA
Astro-Links
W. Stricklings Astro-Homepage
Astronomie.de
Selbstbau Armin Endt
Selbstbau Reiner Vogel
Selbstbau T. Klotzbücher
Lehrreiche Perlen der auch Begeisterungsförderung
Bärtierchen
Schleimpilze
|