| | Kategorien
Comic-Art ...
Special Pin-Ups, ...
Surreale Sichten, ...
Reale Sichten, ...
Cartoons, ...
Karikaturen, ...
Unsortiert, Zeichnungen, ...
Textblumen, ...
Der Kirchenplanet.
Spezielle Streifzüge.
Quick and dirty.
Märchenhaftes
Dark worlds.
Bürgerlich Anständiges.
Kunst vom Nachwuchs.
Texte ...
Artikel ...
Kosmisches ...
Hintergrundrauschen ...
Achtung, Wääärbung ...
Sonstiges ...
Übersicht
Aktueller Beitrag

Add-ons
Selbstbauteleskope
Raumfahrtkatalog
Veröffentlichtes


|
|
Motivation
Vorheriger Artikel
Übersicht
Startseite
Galerie
Nächster Artikel
Impressum
08.09.2018 von eb
, - Aktuelle Bilder
Kein Navi fürs All, aber hilfreich für die KI
(KI = (k)eine (I)ntelligenz)
Klick macht alle Bilder größer
 Encodersysteme am Dobson, -speziell die Standalone-Versionen davon, sieht mancher gestandene Sterngucker ja mit verkniffenen Augen. Nicht ganz zu unrecht, denn besonders bei Einsteigern ins Metier, ist die Gefahr groß, sich durch zu viel elektronische Hilfestellung mit alt-ehrwürdigeren Formen der Himmelsnavigation gar nicht erst befassen zu wollen. Auch wenn die Vergleiche aufgrund der unterschiedlichen Techniken sicher hinken, so ist dies bei Ausfall der Technik, gar nicht mal so unähnlich dem seltsamen
Zustand, in welchem sich dann auch ein von Anfang an ans Navi und GPS gewöhnter Autofahrer- oder gar ein Seemann befindet. Fürs Rudelspechteln am einzelnen Gerät ohne motorisierte Montierung, besonders mit unter Strom stehenden Kindern, wo man zusätzlich zum Positionieren und Hilfestellungen beim manuellen Nachführen, - wie auch Einstellen, - sowieso die Augen überall haben muss, können auf einem Display dargestellte Koordinaten, unter Umständen aber ganz hilfreich sein etwas Stress einzusparen. Aber wie fürs eventuelle Fotografieren, arbeite ich dafür ja sowieso am motorisiertem Betrieb, während im entsprechend abgesenktem Zustand, - für den stolzen, Strom-freien und technisch unabhängigem Dobsonianer, welcher nicht mehr braucht wie sein Scope und seine Erdnussbutterstulle, - Motoren und Encoder, sowieso weg kommen. Für motorisierte Montierungen, sind die Dinger aber nicht nur ein wirklich hilfreiches Inputsystem zum Abgleich, sondern auch äußerst nützlich für Korrekturen und zum Herausfinden der meisten für die Motorisierung "real" nötigen Parameter, wie eben auch der Feinheiten, die sonst über die blanke Theorie hinaus gehen.
Encodersysteme am Dobson, -speziell die Standalone-Versionen davon, sieht mancher gestandene Sterngucker ja mit verkniffenen Augen. Nicht ganz zu unrecht, denn besonders bei Einsteigern ins Metier, ist die Gefahr groß, sich durch zu viel elektronische Hilfestellung mit alt-ehrwürdigeren Formen der Himmelsnavigation gar nicht erst befassen zu wollen. Auch wenn die Vergleiche aufgrund der unterschiedlichen Techniken sicher hinken, so ist dies bei Ausfall der Technik, gar nicht mal so unähnlich dem seltsamen
Zustand, in welchem sich dann auch ein von Anfang an ans Navi und GPS gewöhnter Autofahrer- oder gar ein Seemann befindet. Fürs Rudelspechteln am einzelnen Gerät ohne motorisierte Montierung, besonders mit unter Strom stehenden Kindern, wo man zusätzlich zum Positionieren und Hilfestellungen beim manuellen Nachführen, - wie auch Einstellen, - sowieso die Augen überall haben muss, können auf einem Display dargestellte Koordinaten, unter Umständen aber ganz hilfreich sein etwas Stress einzusparen. Aber wie fürs eventuelle Fotografieren, arbeite ich dafür ja sowieso am motorisiertem Betrieb, während im entsprechend abgesenktem Zustand, - für den stolzen, Strom-freien und technisch unabhängigem Dobsonianer, welcher nicht mehr braucht wie sein Scope und seine Erdnussbutterstulle, - Motoren und Encoder, sowieso weg kommen. Für motorisierte Montierungen, sind die Dinger aber nicht nur ein wirklich hilfreiches Inputsystem zum Abgleich, sondern auch äußerst nützlich für Korrekturen und zum Herausfinden der meisten für die Motorisierung "real" nötigen Parameter, wie eben auch der Feinheiten, die sonst über die blanke Theorie hinaus gehen.
 Was aber ebenfalls nicht heißen soll, dass sie deshalb zwingend nötig sind. Denn auch dafür, gibt es andere Möglichkeiten, die einem den tiefen Griff
in die Geldbörse dafür ersparen können. Teuer, sind sie nämlich schon. Hätte unsereiner nicht vor zehn Jahren, mal zwei gute optische Encoder mit
jeweils 4000 Teilstrichen wirklich preisgünstig erstehen können, würde ich andere Wege gehen oder mir Eigenbauten mit Segmentscheiben aus alten
Druckern überlegen. Um die Auflösung von Segmentscheiben mit geringerer Strichzahl zu erhöhen, gibt es ebenfalls andere Möglichkeiten, als mehr Striche
auf der Scheibe. Denn heute, legt man für Gleiches mit zwar schon bis zu 10000 Teilstrichen, aber dafür eben auch auf dem Astromarkt über einen- und nicht selten sogar zwei satte Hunnis pro Ding auf den Ladentisch.
Von irgendeiner Elektronik zur Verwertung davon, auch unabhängig von existierenden Steuerungen von der Stange, ist dabei noch nicht mal gesprochen.
Sei's drum, - die zwei Teile wurden bei mir bisher lediglich zum Testen benutzt, lagen ansonsten einfach nur ungenutzt herum, - also verwende ich sie jetzt auch generell als Zusatzsystem zu meiner Motorisierung.
Was aber ebenfalls nicht heißen soll, dass sie deshalb zwingend nötig sind. Denn auch dafür, gibt es andere Möglichkeiten, die einem den tiefen Griff
in die Geldbörse dafür ersparen können. Teuer, sind sie nämlich schon. Hätte unsereiner nicht vor zehn Jahren, mal zwei gute optische Encoder mit
jeweils 4000 Teilstrichen wirklich preisgünstig erstehen können, würde ich andere Wege gehen oder mir Eigenbauten mit Segmentscheiben aus alten
Druckern überlegen. Um die Auflösung von Segmentscheiben mit geringerer Strichzahl zu erhöhen, gibt es ebenfalls andere Möglichkeiten, als mehr Striche
auf der Scheibe. Denn heute, legt man für Gleiches mit zwar schon bis zu 10000 Teilstrichen, aber dafür eben auch auf dem Astromarkt über einen- und nicht selten sogar zwei satte Hunnis pro Ding auf den Ladentisch.
Von irgendeiner Elektronik zur Verwertung davon, auch unabhängig von existierenden Steuerungen von der Stange, ist dabei noch nicht mal gesprochen.
Sei's drum, - die zwei Teile wurden bei mir bisher lediglich zum Testen benutzt, lagen ansonsten einfach nur ungenutzt herum, - also verwende ich sie jetzt auch generell als Zusatzsystem zu meiner Motorisierung.
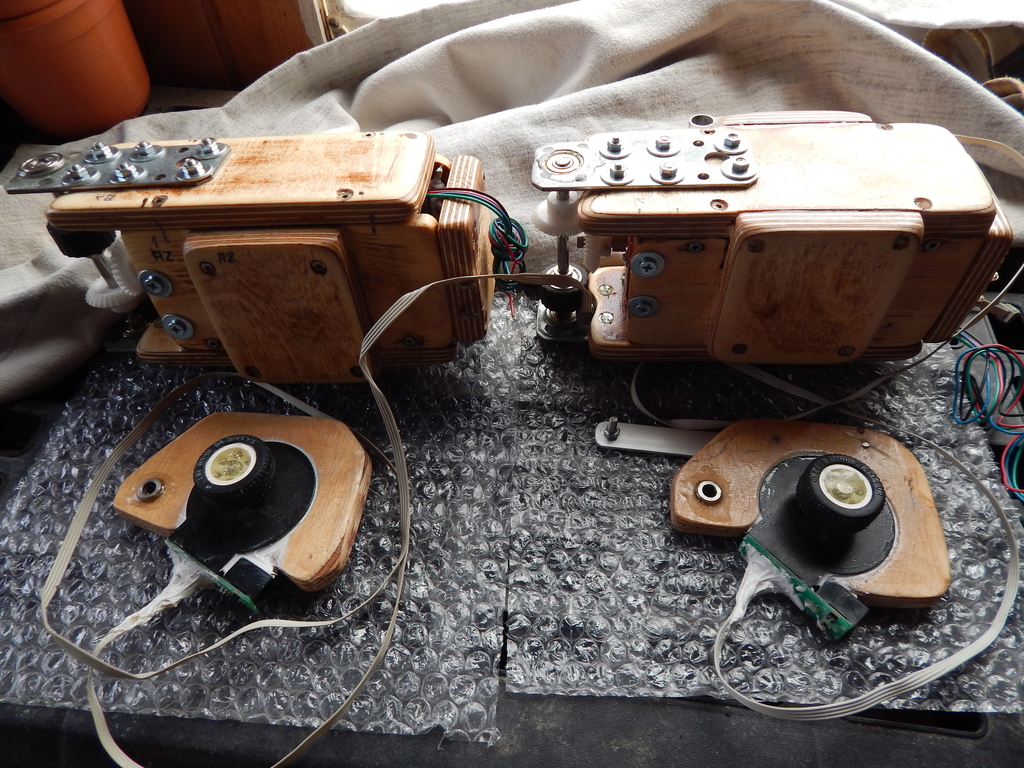
 Die Montierung an der Montierung davon, geschieht bei mir nicht im Zentrum der jeweiligen Achse, sondern ist quasi die gleiche wie die der
Motorblöcke.
Die Encoder sind jeweils mit Silikon in einer Holzrahmung verklebt, die auf eine Welle aufgesteckt wird und mittels leichter Zugfedern, wird ein Antriebsrad an den Außenrand des großen Kreises der Gabelunterseite, bzw. des Hebelrades der Alt-Achse an-gedrückt. Sie lassen sich also genauso schnell zustecken und wieder entfernen, wie die Motoren. Wobei, sinnigerweise, die Encoder nichts antreiben, sondern selbst dadurch angetrieben werden, was wiederum durch die Motoren oder manuell angetrieben wird. Eine Zusatzbelastung für die Motoren dadurch, darf man aber getrost in den Bereich des Bedeutungslosen verorten. Durch das Verhältnis; Umfang der großen Kreise zum Umfang der an-gedrückten Antriebsräder für die Encoder, entsteht eine Übersetzung, die in meinem Fall, die Auflösung der Encoder nochmals um ca. den Faktor 20 vergrößert.
Die Montierung an der Montierung davon, geschieht bei mir nicht im Zentrum der jeweiligen Achse, sondern ist quasi die gleiche wie die der
Motorblöcke.
Die Encoder sind jeweils mit Silikon in einer Holzrahmung verklebt, die auf eine Welle aufgesteckt wird und mittels leichter Zugfedern, wird ein Antriebsrad an den Außenrand des großen Kreises der Gabelunterseite, bzw. des Hebelrades der Alt-Achse an-gedrückt. Sie lassen sich also genauso schnell zustecken und wieder entfernen, wie die Motoren. Wobei, sinnigerweise, die Encoder nichts antreiben, sondern selbst dadurch angetrieben werden, was wiederum durch die Motoren oder manuell angetrieben wird. Eine Zusatzbelastung für die Motoren dadurch, darf man aber getrost in den Bereich des Bedeutungslosen verorten. Durch das Verhältnis; Umfang der großen Kreise zum Umfang der an-gedrückten Antriebsräder für die Encoder, entsteht eine Übersetzung, die in meinem Fall, die Auflösung der Encoder nochmals um ca. den Faktor 20 vergrößert.
 Die Dinger lassen i.d.R. immer minimum Frequenzen bis zu 100 Kiloherz zu. Erhöht man die Auflösung einer Segmentscheibe mit 4000 Teilstrichen, wie in meinem Fall mittels einer Übersetzung, um den
Faktor 20, liegt man mit 20 * 4000 = 80000. Der theoretische worst-case, wäre in etwa die heftige ruckartige Brutalität seinem Dobson gegenüber, seine AZ-Achse tatsächlich innerhalb einer Sekunde um 360- oder seine Alt-Achse, innerhalb einer viertel Sekunde um 90 Grad zu drehen. Mit 80 Kiloherz, lägen wir dabei also immer noch im grünen Bereich. Zumindest, bezüglich der Signalqualität der Encoder. Für den Programmierer eines entsprechenden Prozessors, welcher die Interrupts davon verarbeiten muss, erfordert es natürlich eine gewisse Sorgfalt bei der Kalkulation. Für einen dieser
hübschen kleinen Atmega(8/32/128)-Prozessörchen, welchen man z.B. mit 14,7456Mhz getaktet hat, wären da im worst-case aber immer noch Platz für 184 1Byte-Befehle für einen Interrupt, ohne, dass eine Stackwanne überlaufen könnte. Operiert man im Interrupt
mit Assembler und kalkuliert dabei sauber die Verbrauchszeiten seiner Befehle, kriegt man mit ultimativ max. 40 Takten, inklusive Sicherung und Resetting der benötigten Register auf/vom Stack, auf jeden Fall den Signalwechsel eines Encodersignals, das Incrementieren oder Decrementieren eines Zählers dafür, sowie noch das Setzen von ein paar Flags hin. Jedenfalls immer noch ausreichend, um auch vier solcher Interrupts für jeweils das "A" und "B" Signal von zwei Encodern selbst noch im übertriebenen worst-case sauber arbeiten lassen zu können. Beim kargen Speicher, muss man bezüglich des Stacks natürlich berücksichtigen, dass dabei Situationen auftauchen können, wo max. vier Interrupts gleichzeitig auftreten können, die sich entsprechend aufstapeln werden. Trotzdem hätte im worst-case sogar noch das Hauptprogramm, welches hier ständig interruptet würde, noch ein klein wenig Luft. Das ist aber alles mehr oder weniger Kalkulation außerhalb jedes norrmalem Handlings, - denn bei mir liegt die Höchstgeschwindigkeit im motorisierten Betrieb, lediglich bei ca. 1,5 Grad pro Sekunde, was bei einer Encoderauflösung von 1.296.000 Bogensekunden(360 Grad) / 4000 / 20 = 16,2 BS und 1,5 * 3600 / 16,2 = 333,3 Hz als Maximalfrequenz ausmachen würde, während es beim Nachführen lediglich alle 1,08 Sekunden einmal tickt. Ich berücksichtige den worst-case aber trotzdem, da sich meine Motörchen ja auch bequem ab-winkeln lassen und die eine oder andere flotte manuelle Positionierung zwischendurch ermöglichen. Die mache ich sicher auch nicht mit roher Gewalt, aber der Teufel ist ein Eichhörnchen und dies kalkuliert man einfach mit ein.
Die Dinger lassen i.d.R. immer minimum Frequenzen bis zu 100 Kiloherz zu. Erhöht man die Auflösung einer Segmentscheibe mit 4000 Teilstrichen, wie in meinem Fall mittels einer Übersetzung, um den
Faktor 20, liegt man mit 20 * 4000 = 80000. Der theoretische worst-case, wäre in etwa die heftige ruckartige Brutalität seinem Dobson gegenüber, seine AZ-Achse tatsächlich innerhalb einer Sekunde um 360- oder seine Alt-Achse, innerhalb einer viertel Sekunde um 90 Grad zu drehen. Mit 80 Kiloherz, lägen wir dabei also immer noch im grünen Bereich. Zumindest, bezüglich der Signalqualität der Encoder. Für den Programmierer eines entsprechenden Prozessors, welcher die Interrupts davon verarbeiten muss, erfordert es natürlich eine gewisse Sorgfalt bei der Kalkulation. Für einen dieser
hübschen kleinen Atmega(8/32/128)-Prozessörchen, welchen man z.B. mit 14,7456Mhz getaktet hat, wären da im worst-case aber immer noch Platz für 184 1Byte-Befehle für einen Interrupt, ohne, dass eine Stackwanne überlaufen könnte. Operiert man im Interrupt
mit Assembler und kalkuliert dabei sauber die Verbrauchszeiten seiner Befehle, kriegt man mit ultimativ max. 40 Takten, inklusive Sicherung und Resetting der benötigten Register auf/vom Stack, auf jeden Fall den Signalwechsel eines Encodersignals, das Incrementieren oder Decrementieren eines Zählers dafür, sowie noch das Setzen von ein paar Flags hin. Jedenfalls immer noch ausreichend, um auch vier solcher Interrupts für jeweils das "A" und "B" Signal von zwei Encodern selbst noch im übertriebenen worst-case sauber arbeiten lassen zu können. Beim kargen Speicher, muss man bezüglich des Stacks natürlich berücksichtigen, dass dabei Situationen auftauchen können, wo max. vier Interrupts gleichzeitig auftreten können, die sich entsprechend aufstapeln werden. Trotzdem hätte im worst-case sogar noch das Hauptprogramm, welches hier ständig interruptet würde, noch ein klein wenig Luft. Das ist aber alles mehr oder weniger Kalkulation außerhalb jedes norrmalem Handlings, - denn bei mir liegt die Höchstgeschwindigkeit im motorisierten Betrieb, lediglich bei ca. 1,5 Grad pro Sekunde, was bei einer Encoderauflösung von 1.296.000 Bogensekunden(360 Grad) / 4000 / 20 = 16,2 BS und 1,5 * 3600 / 16,2 = 333,3 Hz als Maximalfrequenz ausmachen würde, während es beim Nachführen lediglich alle 1,08 Sekunden einmal tickt. Ich berücksichtige den worst-case aber trotzdem, da sich meine Motörchen ja auch bequem ab-winkeln lassen und die eine oder andere flotte manuelle Positionierung zwischendurch ermöglichen. Die mache ich sicher auch nicht mit roher Gewalt, aber der Teufel ist ein Eichhörnchen und dies kalkuliert man einfach mit ein.
 Die recht feine Auflösung der Encoder von ca. 16 Bogensekunden, müsste eigentlich nicht sein, bringt aber natürlich selbst noch bezüglich solcher Wechsel zwischen manueller Bedienung und motorisierter Nachkorrektur davon, einige nicht zu missachtende Vorteile. Bogensekunden, sind z.B. einfach schneller abgefahren wie Bogenminuten, um anhand der Signalwechsel wieder einen eindeutigen Koordinatenbezug zu haben. Ungleichheiten zwischen Encoderposition und Motorposition, z.B. wegen durch-gerutschter Antriebsräder oder verlorener Mikroschritte, können viel früher bemerkt und eventuell besser korrigiert werden. (Immer vorausgesetzt natürlich, dass die Haftung der Antriebsräder vom Encoder besser klappt :-) Zu meinen vorgemerkten Gedanken, gehört sogar, dass sich eventuelle Problemzonen am Holze, viel feiner für softwaretechnische Kompensationen während fotografischer Langzeitbelichtungen vermerken- wie danach auch berücksichtigen lassen werden. Dafür halte ich mir noch entsprechende Markierungen am Holze und vielleicht sogar noch ein zusätzliches mechanisch ausgelöstes Inputsignal im Kopf vor, - um dafür immer die gleichen Voraussetzungen haben zu können. Beim manuellem Positionieren mal zwischendurch, ist es natürlich auch hübsch, wenn man ohne große Sucherei, Objekte im Bogensekundenbereich, anhand von manuell geführten Koordinaten eventuell auch schon direkt im Sichtraum vom Tubus hat. Aber dies fällt bereits schon wieder unter die anfangs erwähnten verkniffenen Augen des Sternguckers. Sinnigerweise, ist im Moment aber sowieso nur angedacht, dass meine Encoder lediglich einen eigenen Prozessor für auch eine gewisse funktionale Autarkie bekommen, der sogar noch Platz für eventuelle andere Input-Nettigkeiten hat- aber ansonsten im übrigen SPI-Netz meiner Motorisierung hängt. Ein eigenes Display mit gar noch eigener Bedienertastatur für eine autarke Nutzung als Astronavi, ist bisher jedenfalls nicht vorgesehen, während es aber sicher eine visuelle Wiedergabe der Encoderpositionen im Vergleich zu den Motorpositionen im letztendlichen Bedienergerät geben wird.
Die recht feine Auflösung der Encoder von ca. 16 Bogensekunden, müsste eigentlich nicht sein, bringt aber natürlich selbst noch bezüglich solcher Wechsel zwischen manueller Bedienung und motorisierter Nachkorrektur davon, einige nicht zu missachtende Vorteile. Bogensekunden, sind z.B. einfach schneller abgefahren wie Bogenminuten, um anhand der Signalwechsel wieder einen eindeutigen Koordinatenbezug zu haben. Ungleichheiten zwischen Encoderposition und Motorposition, z.B. wegen durch-gerutschter Antriebsräder oder verlorener Mikroschritte, können viel früher bemerkt und eventuell besser korrigiert werden. (Immer vorausgesetzt natürlich, dass die Haftung der Antriebsräder vom Encoder besser klappt :-) Zu meinen vorgemerkten Gedanken, gehört sogar, dass sich eventuelle Problemzonen am Holze, viel feiner für softwaretechnische Kompensationen während fotografischer Langzeitbelichtungen vermerken- wie danach auch berücksichtigen lassen werden. Dafür halte ich mir noch entsprechende Markierungen am Holze und vielleicht sogar noch ein zusätzliches mechanisch ausgelöstes Inputsignal im Kopf vor, - um dafür immer die gleichen Voraussetzungen haben zu können. Beim manuellem Positionieren mal zwischendurch, ist es natürlich auch hübsch, wenn man ohne große Sucherei, Objekte im Bogensekundenbereich, anhand von manuell geführten Koordinaten eventuell auch schon direkt im Sichtraum vom Tubus hat. Aber dies fällt bereits schon wieder unter die anfangs erwähnten verkniffenen Augen des Sternguckers. Sinnigerweise, ist im Moment aber sowieso nur angedacht, dass meine Encoder lediglich einen eigenen Prozessor für auch eine gewisse funktionale Autarkie bekommen, der sogar noch Platz für eventuelle andere Input-Nettigkeiten hat- aber ansonsten im übrigen SPI-Netz meiner Motorisierung hängt. Ein eigenes Display mit gar noch eigener Bedienertastatur für eine autarke Nutzung als Astronavi, ist bisher jedenfalls nicht vorgesehen, während es aber sicher eine visuelle Wiedergabe der Encoderpositionen im Vergleich zu den Motorpositionen im letztendlichen Bedienergerät geben wird.
|
0 Kommentare
Motivation
Vorheriger Artikel
Übersicht
Startseite
Galerie
Nächster Artikel
Impressum
|
| Blogs
aebby LOG
endless.good.news
Hinterher will es niemand gewesen sein
Fliegende Bretter
The Heat Is On
Ian Musgrave's Astroblog
Thursday June 25 to Thursday July 2
Psiram
Kreativ-Links
Bildgrund11
Exportabel
Comiclopedia
gnaddrig ad libitum
Europ. Märchengesellschaft
Kunstverein Freiburg
Markus Waltenberger
Textem-Kulturgespenster
Maf Räderscheidt
Lothar Thiel
Tell
ZAZA
Astro-Links
W. Stricklings Astro-Homepage
Astronomie.de
Selbstbau Armin Endt
Selbstbau Reiner Vogel
Selbstbau T. Klotzbücher
Lehrreiche Perlen der auch Begeisterungsförderung
Bärtierchen
Schleimpilze
|